A distributed task reassignment method in dynamic environment for multi-UAV system
- Published: 24 May 2021
- Volume 52 , pages 1582–1601, ( 2022 )

Cite this article
- Mi Yang 1 ,
- Wenhao Bi ORCID: orcid.org/0000-0002-3944-5395 1 ,
- An Zhang 1 &
- Fei Gao 1
1563 Accesses
14 Citations
Explore all metrics
This paper considers the task reassignment problem for distributed multiple Unmanned Aerial Vehicle (multi-UAV) systems in dynamic environment. For a dynamic reassignment problem in a multi-UAV system, the task information may be subject to different dynamic events, and many existing task allocation algorithms require much computation and communication resource to achieve a feasible solution. Hence, this paper proposes a distributed method to cope with dynamic events that occur online during the execution of original schedules. First, a distributed framework for determining the processing strategy according to the types of dynamic events is introduced. Second, a partial reassignment algorithm (PRA) is proposed to support the framework and an incremental subteam formation mechanism and a partial releasing mechanism are developed to release the computation and communication burden. Furthermore, a modified inclusion phase to maximize assignment (MIP-MA) is also proposed in PRA to maximize the number of task allocations. Numerical simulations demonstrate that the proposed method is able to provide a conflict-free solution with less data exchanges and runtime.
This is a preview of subscription content, log in via an institution to check access.
Access this article
Price includes VAT (Russian Federation)
Instant access to the full article PDF.
Rent this article via DeepDyve
Institutional subscriptions
Similar content being viewed by others

A resource-constrained distributed task allocation method based on a two-stage coalition formation methodology for multi-UAVs
Mi Yang, An Zhang, … Yunong Wang

Multiple Tasks Assignment for Cooperating Homogeneous Unmanned Aerial Vehicles

A Review of Unmanned Aerial Vehicle Swarm Task Assignment
Alshawi MA, Shalan MB (2017) Minimal time dynamic task allocation for a swarm of robots. Int J Mech Eng Robot Res 6(6)
Badreldin M, Hussein A, Khamis A (2013) A comparative study between optimization and market-based approaches to multi-robot task allocation. Advances in Artificial Intelligence (16877470)
Bänziger T, Kunz A, Wegener K (2018) Optimizing human–robot task allocation using a simulation tool based on standardized work descriptions. J Intell Manuf:1–14
Binetti G, Naso D, Turchiano B (2013) Decentralized task allocation for surveillance systems with critical tasks. Robot Auton Syst 61(12):1653–1664
Article Google Scholar
Cao Y, Yu W, Ren W, Chen G (2012) An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans Ind Inform 9(1):427–438
Chen X, Zhang P, Du G, Li F (2019) A distributed method for dynamic multi-robot task allocation problems with critical time constraints. Robot Auton Syst 118:31–46
Choi HL, Brunet L, How JP (2009) Consensus-based decentralized auctions for robust task allocation. IEEE Trans Robot 25(4):912–926
Chopra S, Notarstefano G, Rice M, Egerstedt M (2017) A distributed version of the hungarian method for multirobot assignment. IEEE Trans Robot 33(4):932–947
Farinelli A, Iocchi L, Nardi D (2017) Distributed on-line dynamic task assignment for multi-robot patrolling. Auton Robot 41(6):1321–1345
Fu X, Feng P, Gao X (2019) Swarm uavs task and resource dynamic assignment algorithm based on task sequence mechanism. IEEE Access 7:41090–41100
Geng N, Meng Q, Gong D, Chung PW (2018) How good are distributed allocation algorithms for solving urban search and rescue problems? a comparative study with centralized algorithms. IEEE Trans Autom Sci Eng 16(1):478–485
Gerkey BP, Matarić MJ (2004) A formal analysis and taxonomy of task allocation in multi-robot systems. Int J Robot Res 23(9):939–954
Huang H, Zhuo T (2019) Multi-model cooperative task assignment and path planning of multiple ucav formation. Multimed Tools Appl 78(1):415–436
Jang I, Shin HS, Tsourdos A (2018) Anonymous hedonic game for task allocation in a large-scale multiple agent system. IEEE Trans Robot 34(6):1534–1548
Jia Z, Yu J, Ai X, Xu X, Yang D (2018) Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm. Aerosp Sci Technol 76:112–125
Johnson L, Ponda S, Choi HL, How J (2011) Asynchronous decentralized task allocation for dynamic environments. In: Infotech@ aerospace, vol 2011, pp 1441
Kapoutsis AC, Chatzichristofis SA, Doitsidis L, de Sousa JB, Pinto J, Braga J, Kosmatopoulos EB (2016) Real-time adaptive multi-robot exploration with application to underwater map construction. Auton Robot 40(6):987–1015
Korsah GA, Stentz A, Dias MB (2013) A comprehensive taxonomy for multi-robot task allocation. Int J Robot Res 32(12):1495–1512
Lim WH, Isa NAM (2015) Particle swarm optimization with dual-level task allocation. Eng Appl Artif Intell 38:88–110
Luo L, Chakraborty N, Sycara K (2015) Distributed algorithms for multirobot task assignment with task deadline constraints. IEEE Trans Autom Sci Eng 12(3):876–888
Nayak S, Yeotikar S, Carrillo E, Rudnick-Cohen E, Jaffar MKM, Patel R, Azarm S, Herrmann JW, Xu H, Otte M (2020) Experimental comparison of decentralized task allocation algorithms under imperfect communication. IEEE Robot Autom Letts 5(2):572–579
Nelke SA, Okamoto S, Zivan R (2020) Market clearing–based dynamic multi-agent task allocation. ACM Trans Intell Syst Technol (TIST) 11(1):1–25
Nunes E, Manner M, Mitiche H, Gini M (2017) A taxonomy for task allocation problems with temporal and ordering constraints. Robot Auton Syst 90:55–70
Oh G, Kim Y, Ahn J, Choi HL (2017) Market-based task assignment for cooperative timing missions in dynamic environments. J Intell Robot Syst 87(1):97–123
Otte M, Kuhlman MJ, Sofge D (2020) Auctions for multi-robot task allocation in communication limited environments. Auton Robot 44(3):547–584
Schillinger P, Bürger M, Dimarogonas DV (2018) Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. Int J Robot Res 37(7):818– 838
Seenu N, RM KC, Ramya M, Janardhanan MN (2020) Review on state-of-the-art dynamic task allocation strategies for multiple-robot systems. Industrial Robot: the international journal of robotics research and application
Torreño A, Onaindia E, Komenda A, Štolba M (2018) Cooperative multi-agent planning: A survey. ACM Comput Surv (CSUR) 50(6):84
Turner J, Meng Q, Schaefer G, Whitbrook A, Soltoggio A (2017) Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans Cybern 48(9):2583–2597
Wang C, Mu D, Zhao F, Sutherland JW (2015) A parallel simulated annealing method for the vehicle routing problem with simultaneous pickup–delivery and time windows. Comput Ind Eng 83:111–122
Wei C, Hindriks KV, Jonker CM (2016) Dynamic task allocation for multi-robot search and retrieval tasks. Appl Intell 45(2):383–401
Whitbrook A, Meng Q, Chung PW (2017) Reliable, distributed scheduling and rescheduling for time-critical, multiagent systems. IEEE Trans Autom Sci Eng 15(2):732–747
Whitbrook A, Meng Q, Chung PW (2019) Addressing robustness in time-critical, distributed, task allocation algorithms. Appl Intell 49(1):1–15
Wu H, Li H, Xiao R, Liu J (2018a) Modeling and simulation of dynamic ant colony’s labor division for task allocation of uav swarm. Physica A: Stat Mech Appl 491:127–141
Wu W, Cui N, Shan W, Wang X (2018b) Distributed task allocation for multiple heterogeneous uavs based on consensus algorithm and online cooperative strategy. Aircraft Engineering and Aerospace Technology
Xie S, Zhang A, Bi W, Tang Y (2019) Multi-uav mission allocation under constraint. Appl Sci 9(11):2184
Yao W, Qi N, Wan N, Liu Y (2019) An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp Sci Technol 86:455–464
Ye F, Chen J, Sun Q, Tian Y, Jiang T (2021) Decentralized task allocation for heterogeneous multi-uav system with task coupling constraints. J Supercomput 77(1):111–132
Zhang A, Zhou D, Yang M, Yang P (2018) Finite-time formation control for unmanned aerial vehicle swarm system with time-delay and input saturation. IEEE Access 7:5853–5864
Zhao W, Meng Q, Chung PW (2015) A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans Cybern 46(4):902–915
Zhou X, Wang H, Ding B, Hu T, Shang S (2019) Balanced connected task allocations for multi-robot systems: an exact flow-based integer program and an approximate tree-based genetic algorithm. Expert Syst Appl 116:10–20
Zhu W, Li L, Teng L, Yonglu W (2018) Multi-uav reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chin J Aeronaut 31 (2):339–350
Zitouni F, Harous S, Maamri R (2020) A distributed approach to the multi-robot task allocation problem using the consensus-based bundle algorithm and ant colony system. IEEE Access 8:27479–27494
Download references
Acknowledgements
Mi Yang and Wenhao Bi contributed equally to this article. This work was supported by the National Natural Science Foundation of China (No. 61903305, No. 62073267), the Aeronautical Science Fund (No. 201905053001) and the Research Funds for Interdisciplinary Subject, NWPU.
Author information
Authors and affiliations.
School of Aeronautics, Northwestern Polytechnical University, Xi’an, Shaanxi, 710072, China
Mi Yang, Wenhao Bi, An Zhang & Fei Gao
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Wenhao Bi .
Additional information
Publisher’s note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Natural Science Foundation of China (No. 61903305, No. 62073267), the Aeronautical Science Fund (No. 201905053001) and the Research Funds for Interdisciplinary Subject, NWPU.
Rights and permissions
Reprints and permissions
About this article
Yang, M., Bi, W., Zhang, A. et al. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl Intell 52 , 1582–1601 (2022). https://doi.org/10.1007/s10489-021-02502-3
Download citation
Accepted : 04 May 2021
Published : 24 May 2021
Issue Date : January 2022
DOI : https://doi.org/10.1007/s10489-021-02502-3
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Multi-UAV system
- Dynamic environment
- Distributed task allocation
- Heuristic algorithm
- Find a journal
- Publish with us
- Track your research

How to Reassign a Project within Your Team
Managers must be intentional when shifting responsibilities across team members.

Introduction
Delicately reassigning a project within your team can be a challenging task, especially if it might come as a surprise. However, it can be accomplished with careful planning and communication. In this blog post, we will discuss five ways managers can delicately navigate reassigning a project within their team.
Review the Situation
Before reassigning a project, it is important to review the situation. Managers should consider the current progress of the project, the skills and experience of the team members involved, and the reason for the reassignment. This will help managers to make an informed decision and prepare them to communicate the reassignment to the team members involved. They should also consider the long-term goals of the organization and how the reassignment fits into those goals. Managers should ask themselves:
What is the current progress of the project?
What skills and experience do the team members involved have?
What is the reason for the reassignment?
Communicate Effectively
Communication is key when reassigning a project within your team. Managers must be clear about what is expected of each team member and how the change in responsibilities will affect their workload. It is vital to keep the communication lines open and transparent with the team members. The managers should also be transparent about why the change is necessary and how it will benefit the team and the organization. It is important to listen to the concerns and feedback of team members and address any questions or issues they may have. The team members should be given adequate time to adjust to the changes. Managers should consider:
What is expected of each team member?
How will the change in responsibilities affect their workload?
How can you keep the communication lines open and transparent with the team members?
Provide Support and Training
When reassigning a project, managers should provide support and training to team members who may be taking on new tasks. This can include providing resources and tools to help them complete the task successfully or offering training sessions to help them develop the necessary skills. Managers should also be available to answer any questions and provide guidance throughout the process. The team members should be provided with adequate support to help them adjust to the changes and help them to complete the task successfully. This support can also help team members to grow and develop new skills that will benefit them in the long run.
What resources and tools can you provide to help team members complete the task successfully?
What training sessions can you offer to help team members develop the necessary skills?
How can you provide guidance and support throughout the reassignment process?
Be Mindful of the Team Members' Feelings
It is vital to keep in mind the feelings of the team members when reassigning a project. Reassigning a project might come as a surprise to some team members, and it might affect their morale. Managers should be mindful of how the reassignment might affect the team members and take steps to address their concerns. The team members should be reassured that the reassignment is not a reflection of their performance but rather a strategic decision made for the benefit of the organization. Managers should also recognize and acknowledge the hard work and contributions of team members. They should ask themselves:
How might the reassignment affect the morale of the team members?
What steps can you take to address their concerns?
How can you reassure team members that the reassignment is not a reflection of their performance (unless it is)?
Provide Opportunities for Growth
Reassigning a project can also provide opportunities for growth and development for team members. Managers should aim to identify the strengths and weaknesses of team members and assign tasks that will help them to grow and develop new skills. This can help team members to feel valued and motivated, and it can also benefit the organization by increasing the skillset of the team. Managers should think about:
What strengths and weaknesses do team members have?
What tasks can you assign to help team members grow and develop new skills?
How can you motivate team members and create a culture of collaboration and accountability?
Delicately reassigning a project within your team can be a challenging task, but it is essential for the success of any organization. By reviewing the situation, communicating effectively, providing support and training, being mindful of the team members' feelings, and providing opportunities for growth, managers can ensure a smooth transition and help their team members grow and develop. By following these steps, managers can create a culture of collaboration and accountability that will benefit the entire organization.
Ready for more?

Reassign tasks
You can reassign your assigned SAP Workflow tasks to a different Task Decision Maker . You can reassign a task when you are finished with it, or a when a task is assigned to you in error. Tasks are located in different areas of Duet Enterprise for Microsoft SharePoint and SAP.
A site designer can include an SAP workflow in any Duet Enterprise site. Because of this, you might find tasks in a variety of locations. Often, an administrator creates a Tasks Center for tasks, but you might also find tasks other areas, such as the Customer Center and the Products Center . For assistance locating tasks in your environment, talk to your workflow manager or your site administrator.
What do you want to do?
Reassign a task from outlook, reassign a task from a duet site.
When you receive a task notification in Outlook, you can assign the task to someone else without leaving Outlook.
In your Outlook Inbox, double-click the name of task notification you want to reassign.
In the body of the notification message, click reassign this task .
In the body of the notification message, click detailed information .
On the Task Details page, in Related Actions , click Reassign this task to another user .
On the Reassign this Task page, in Select User , type the name of the person or group who will complete the task. You can assign only one person or one group to a task.

If you have any comments about the task, type them in Comments .
Click Reassign and you will see the Task Details page.
Top of Page
You can assign your task to someone else from the Duet site.
From the browser, open your Duet site and locate the task you want to reassign.
Click the task you want to assign. This opens the Task Details page.
On the Task Details page, in the Related Actions section, click Reassign this task to another user .
In the Reassign Task dialog box, in Select User , type the name of the person or group who will complete the task. You can assign only one person or one group to a task.
Click Reassign and you will return to your list of workflow tasks.

Need more help?
Want more options.
Explore subscription benefits, browse training courses, learn how to secure your device, and more.

Microsoft 365 subscription benefits

Microsoft 365 training

Microsoft security

Accessibility center
Communities help you ask and answer questions, give feedback, and hear from experts with rich knowledge.

Ask the Microsoft Community

Microsoft Tech Community

Windows Insiders
Microsoft 365 Insiders
Was this information helpful?
Thank you for your feedback.

Appian Rocks
Where no code has gone before.

Task Reassignment vs. Collaboration
So, you got a task assigned and you accept it. Then you find out that you need support from a colleague and reassign it to that person. You would want to include a message to explain your desire. And you would want to see that activity being recorded to the audit trail of that specific process.
That is what you want, but not what you do! Or, to be more specific, you use the wrong tool to do that.
But …. what!?!?!
Let’s briefly look at a fundamental concept in business process design. I am talking about accountability for results for an accepted task. The person accepting a task owns that task and is responsible for the outcome, compliance to internal and external regulation, legal completeness and correctness, and adherence to deadlines.
Task Collaboration
When collaborating with others, you keep the ownership. Others can only support you in fulfilling that task you accepted. And that is exactly the concept you need to build into your application! This is not what the reassignment feature in Appian is meant for.
When building this, you can include features like event recording, approvals, parallel collaboration, … your imagination is the limit.
The initial task will stay with you. Your colleagues will get separate tasks and their own accountability. Once you got what you needed, you complete your task eventually. And it would be better to do it within the given time 😉
Task Reassignment
Now, when reassigning a task, using the reassignment feature in Appian, you pass the accountability along to others. That is the only thing you do, without spending any time on trying to actually work on it. And, from that moment on, you no longer care about this task.
Now, from a process design perspective, the important information to record on tasks is, who completed it. Who is accountable for the outcome?! And was it completed within the given time.
Before I forget, there is an interesting detail in the reassignment implementation in Appian. There is the group of assignees from which any member can accept the task and become the owner. Now, when a user that is in the process security role of a Manager reassigns a task, he actually modifies this group of assignees. This is different to when a non-Manager user does the same, where the group of assignees is not touched. This feature is based on the typical team and team manager setup found in almost all companies.
Based on this concept, Appian specifically designed the reassignment feature. Do not try to use it for anything else.
And yes, I am aware that there are scenarios in which you want to switch this off and implement something custom. Be aware of two things.
- This increases your development, test, debugging, and maintenance effort.
- Your client now has the problem that various Appian based applications behave entirely different.
I tend to slip into the role of a trusted advisor and try to educate my client on the concept of task accountability first. After explaining how Appian supports reassignment and collaboration, we typically find a plain-vanilla Appian solution and stay on the high-speed-low-code track.
Happy Appian-ing!
Share this:
2 thoughts on “ task reassignment vs. collaboration ”.
This is impressive, could you brief about two types of tasks like process driven and data driven. And what’s the best way to design application?
Use all Appian features as much as possible and build process driven apps. There are only rare cases where you might have to built a custom implementation of a OOTB Appian feature.
Leave a Reply Cancel reply
Discover more from appian rocks.
Subscribe now to keep reading and get access to the full archive.
Type your email…
Continue reading

An official website of the United States government
The .gov means it’s official. Federal government websites often end in .gov or .mil. Before sharing sensitive information, make sure you’re on a federal government site.
The site is secure. The https:// ensures that you are connecting to the official website and that any information you provide is encrypted and transmitted securely.
- Publications
- Account settings
Preview improvements coming to the PMC website in October 2024. Learn More or Try it out now .
- Advanced Search
- Journal List
- Sensors (Basel)
- PMC10537739
A Two-Stage Distributed Task Assignment Algorithm Based on Contract Net Protocol for Multi-UAV Cooperative Reconnaissance Task Reassignment in Dynamic Environments
1 College of Computer Engineering, Naval University of Engineering, Wuhan 430033, China; moc.361@eun_euygnim
2 School of Undergraduate Education, Shenzhen Polytechnic University, Shenzhen 518055, China; nc.ude.tpzs@uhoaixnay
Associated Data
Data are contained within the article.
Multi-UAV systems have been widely used in reconnaissance, disaster relief, communication, and other fields. However, many dynamic events can cause a partial failure of the original mission during the mission execution process, in which case task reassignment should be carried out. How to reassign resources and tasks in multi-dynamic, multi-target, and multi-constraint events becomes a core issue in the enhancement of combat efficiency. This paper establishes a model of multi-UAV cooperative reconnaissance task reassignment that comprehensively considers various dynamic factors such as UAV performance differences, size of target areas, and time window constraints. Then, a two-stage distributed task assignment algorithm (TS-DTA) is presented to achieve multi-task reassignment in dynamic environments. Finally, this paper verifies the effectiveness of the TS-DTA algorithm through simulation experiments and analyzes its performance through comparative experiments. The experimental results show that the TS-DTA algorithm can efficiently solve the task reassignment problem in dynamic environments while effectively reducing the communication burden of UAV formations.
1. Introduction
Compared with manned aircrafts, UAVs have the advantages of low cost, strong concealment, and being unmanned [ 1 , 2 , 3 ]. They are widely used in reconnaissance, disaster relief, communication, and other fields [ 4 , 5 , 6 , 7 ]. However, with the continuous expansion of task scales, in many cases, a single UAV cannot complete its tasks efficiently [ 8 ]. Multi-UAV systems have higher efficiency and stronger robustness than single UAVs [ 9 , 10 ]. In order to improve the efficiency and success rate of reconnaissance tasks, multi-UAVs often perform them cooperatively, especially in the field of military reconnaissance. Task assignment is a key issue for multi-UAVs to cooperate efficiently [ 11 ].
Before a reconnaissance mission begins, multi-UAV systems need to assign tasks according to static prior information and obtain the initial mission plan. In recent years, many researchers have established models and proposed solutions to such task assignment problems [ 12 , 13 , 14 , 15 , 16 ]. However, there are many uncertainties in the actual task execution process, such as target movement, drone damage, and many other dynamic events [ 17 ]. When these dynamic events occur, multi-UAV systems need to adjust the initial mission plan to adapt to these changes, a process called task reassignment [ 18 ].
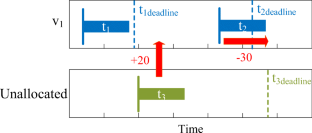
Many researchers have established relevant models of task reassignment in dynamic environments. Yang et al. [ 17 ] established a task reassignment model for multi-UAVs performing search and rescue (SAR) missions, considering five dynamic events: finding new tasks, canceling original tasks, updating task coordinates, updating task deadlines, and updating task durations. However, the model only involved dynamic changes of targets and did not consider damage to UAVs during the mission. In the context of multi-UAV cooperative task assignment in SAR missions, Chen et al. [ 19 ] considered time sensitivity and dynamic environments and studied the problem of multi-UAV task reassignment after the emergence of a new target. However, their model did not consider the simultaneous occurrence of multiple targets. Oh et al. [ 20 ], in the context of suppression of enemy air defense (SEAD) missions, considered the problem of task assignment in the case of pop-up threats and UAV loss. However, the performance differences of UAVs were not considered in the model. Zhang et al. [ 21 ] studied the dynamic task assignment problem in the context of multi-UAVs attacking multiple ground targets cooperatively and considered the emergence of new targets and sudden UAV failure. However, the time window constraint of targets and movement of targets were not considered in the model.
Due to the nature of armed conflict, multi-UAVs are often in a dynamic environment when performing a cooperative reconnaissance mission. Existing multi-UAV task reassignment models in dynamic environments are not directly used for the modeling of multi-dynamic, multi-target, and multi-constraint events. In order to better describe the problem of multi-UAV cooperative reconnaissance task reassignment and discuss the literature on the above subject, this paper establishes a model of multi-UAV cooperative reconnaissance task reassignment in dynamic environments (DE-MCRTR) based on our previous work [ 22 ]. The DE-MCRTR model addresses task reassignment problems in dynamic events, including UAV damage, new target occurrence, location change of the target, as well as time window change of the target, while comprehensively considering various factors such as UAV performance differences, size of target areas, and time window constraints.
Multi-UAV task assignment is an NP-hard problem [ 23 , 24 ]. Commonly used task assignment algorithms can be divided into two categories [ 5 , 19 ]: one comprises centralized algorithms and the other comprises distributed algorithms. Centralized algorithms have the ability of global optimization [ 24 ] but their computational demand is high [ 17 ]. So, the solution speed of centralized algorithms is low, which causes their slow responsiveness to dynamic changes [ 25 ]. Although distributed algorithms cannot obtain global optimal solutions [ 24 ], their computational complexity is relatively small and their stability is higher [ 26 ]. Since task reassignment in dynamic environments is carried out in the process of mission execution, higher requirements are placed on the speed of reassignment. Thus, researchers usually use distributed task assignment algorithms to solve the problem of task reassignment in dynamic environments. The most common are consensus-based auction algorithms and market-based algorithms [ 27 ]. Among them, the most widely used are consensus-based bundle algorithms (CBBAs) [ 28 ] and the contract net protocol (CNP) [ 29 ].
Aiming at the problem of UAV swarms performing cooperative reconnaissance-and-attack tasks on multiple targets in complex and uncertain combat scenarios, Qin et al. [ 30 ] proposed a cooperator determination mechanism and a selection mechanism of sequential tasks, and extended the contract net protocol to design an event-triggered dynamic task allocation strategy. This strategy adopted the selection mechanism of sequential tasks and assigned tasks one by one. When the number of tasks was large, it was difficult to ensure efficiency. Zitouni et al. [ 31 ] proposed a distributed multi-UAV task assignment algorithm by combining a consensus-based bundle algorithm and an ant colony algorithm. However, the algorithm was only applicable if some original tasks were cancelled. Using the state feedback, gradient descent, and primal–dual methods, Deng et al. [ 32 ] designed a distributed algorithm for high-order agents to perform resource allocation tasks autonomously. Zhang et al. [ 33 ] introduced a sales contract, exchange contract, and replacement contract into the original contract net protocol and proposed an algorithm based on a hybrid contract net protocol to achieve dynamic task reassignment. This method had a low proportion of feasible solution combinations in the solving process; so, the solving efficiency was low when the number of targets is large. Yang et al. [ 17 ] proposed a partial reassignment algorithm based on the PI algorithm to realize online task reassignment after the target dynamic changes during mission execution. The algorithm was used for a single task reassignment situation, and it was not suitable for multiple tasks. Gao et al. [ 34 ] designed a task reassignment algorithm based on the contract net protocol to solve the task reassignment problem when new targets appear or UAV damage occurs during task execution. However, with the expansion of the scale of the problem, the number of UAV communications would be multiplied, resulting in poor reliability of the system.
There are multiple targets that need to be assigned in the DE-MCRTR model, and some targets contain time window constraints. In order to realize rapid reassignment of multiple targets, reduce the communication burden of multi-UAV formation, and ensure the quality of task assignment to a certain extent, this paper proposes a two-stage distributed task assignment algorithm based on contract net protocol (TS-DTA). The goal of the first stage and the second stage of the TS-DTA algorithm is to assign the targets without a time window and the targets with a time window, respectively. Based on the original contract net protocol, the bidding strategy with bidding benchmark is introduced in the first stage to reduce the communication burden of UAV formation, the bidding strategy based on route distance is proposed in the first stage to realize synchronous assignment of multiple tasks, and the cyclic bidding strategy based on task timing is proposed in the second stage to achieve efficient assignment of targets with time window constraints.
The rest of this paper is organized as follows: In Section 2 , the background of multi-UAV cooperative reconnaissance task reassignment problem is introduced, and the task reassignment model is established. In Section 3 , the TS-DTA algorithm is introduced in detail. In Section 4 , a series of simulation experiments is conducted. In Section 5 , the conclusions and prospects are given.
2. Task Reassignment Model
This section first introduces the background of the task reassignment problem of multi-UAV cooperative reconnaissance, and then establishes the task reassignment model according to dynamic events.
2.1. Background
The reconnaissance in this paper refers to using the photoelectric equipment and radar carried by UAVs to obtain real-time video and image information of targets so as to provide information support for decision-making for the command center. After the initial mission plan is obtained based on static prior information, UAVs start from their ship platform to each target to perform reconnaissance. The circular reconnaissance route is adopted by UAVs when performing reconnaissance. The radius of circular route is dependent on the danger degree and the size of each target. After completing all tasks, UAVs return to the ship platform. However, in the actual mission execution process, the confrontation between the enemy and ourselves would lead to many dynamic events, such as damage to the UAV, movement of targets, and so on. These dynamic events may partially invalidate the original mission plan. In order to ensure the completion of all tasks, it is necessary to reasonably assign unfinished tasks to currently dispatched UAVs. Combined with the actual mission, this paper focuses on the following four kinds of dynamic events.
(1) UAV damage
During the mission, a drone is suddenly hit by enemy air defense forces, making it impossible to complete the remaining tasks.
(2) New target occurrence
During the reconnaissance mission, early warning aircraft or ships may find some new targets that need to be reconnoitered.
(3) Location change of target
In order to enable UAV formation to quickly capture the moving targets, the provider of prior information needs to update the location of those targets in time.
(4) Time window change of target
In order to realize an effective cooperation with other combat forces, UAVs need to reconnoiter some targets within a given time window. When the time window of some targets are advanced or pushed back, the original plan may no longer meet the requirements of the new time window.
2.2. DE-MCRTR Model
Based on the previous work [ 22 ], this article introduces dynamic events and establishes a multi-UAV cooperative reconnaissance task reassignment model in a dynamic environment. The specific model is as follows:
2.2.1. Basic Information of the Model
(1) After the reconnaissance mission begins, each UAV starts from the ship platform at the same time, and the departure time is t = 0.
(2) UAVs that obtain tasks in the initial task assignment are called dispatched UAVs. After the dynamic event occurs, all dispatched UAVs participate in the task reassignment.
(3) Each task is completed by a single UAV.
(4) Every UAV can obtain its own location in real time.
2.2.2. UAV Model
The UAVs are initially carried by the ship platforms. The number of ship platforms is n s , the ship platform set is S = { S 0 , S 1 , … , S n s − 1 } , and the coordinate of S i is [ X S i , Y S i ] . The types and numbers of UAVs carried by each platform are known. The number of UAVs is n u , the UAV set is U = { U 0 , U 1 , … , U n u − 1 } , the cruising speed of U i is v i , the maximum range of U i is m r i , and the initial coordinate is the coordinate of the ship platform. P l a n = { P 0 , P 1 , … , P n u − 1 } is the task scheme of UAV formation, which will be updated during task execution. The number of dispatched UAVs is n d , U d i s p a t c h = { U d 1 , U d 2 , … , U d n d } . Once U d i is damaged, remove U d i from U d i s p a t c h . When dynamic events occur, the coordinate of U i is [ X U i , Y U i ] ; the leftover maximum range of U i is m r l i ; the list of finished tasks of U i is T F i = { T F i 1 , T F i 2 , … , T F i n f i } ; the list of leftover tasks of U i is T L i = { T L i 1 , T L i 2 , … , T L i n l i } ; and n f i , n l i are the number of finished tasks and leftover tasks of U i , respectively.
2.2.3. Target Model
The initial number of targets is n t , the target set is T = { T 0 , T 1 , … , T n t − 1 } , and the approximate coordinate of T j is [ X T j , Y T j ] . The reconnaissance time window for T j with time window constraint is TW j = [ t w s j , t w e j ] . The radius of the circular reconnaissance route for UAV to reconnaissance target T j is a r j . If n n e w new targets appear, the new target set is T n e w = { T n 1 , T n 2 , … , T n n n e w } , the approximate coordinate of T n i is [ X T n i , Y T n i ] , and the radius of circular reconnaissance route is a r T n i . If T n i contains a time window constraint, the time window is TW T n i = [ t w s T n i , t w e T n i ] . Meanwhile, these new targets need to be added to the original target set T , and the updated target set is T = { T 0 , T 1 , … , T n t − 1 , T n t , … , T n t + n n e w − 1 } . If the location of target T j is changed, its coordinates need to be changed to the new location [ X T j n , Y T j n ] . If the time window of target T j is changed, its time window needs to be changed to the new time window [ t w s j n , t w e j n ] .
2.2.4. Decision Variable
Referring to our previous work [ 22 ], define r e i j as the decision variable, where i = 0 , 1 , … , n u − 1 and j = 0 , 1 , … , n t − 1 . The value of r e i j is 0 or 1; r e i j = 1 indicates that U i conducts reconnaissance on target T j and vice versa.
2.2.5. Constraint Condition
In engineering fields, constraints occur naturally, such as resource limitations, which the agents are subject to [ 35 ]. The purpose of task reassignment is to reasonably assign tasks that have not been finished when a dynamic event occurs under the premise of satisfying various constraints and to obtain a new mission plan, denoted as P l a n n e w = { P n 0 , P n 1 , … , P n n n e w − 1 } .
(1) Completeness constraint
To ensure the effective completion of the mission and avoid resource waste, each target must be reconnoitered by one UAV:
(2) Leftover maximum range constraint
After U i receives the new mission plan P n i , it starts from the current location [ X U i , Y U i ] and flies to each target point in turn to perform reconnaissance. The remaining flight distance of U i is recorded as f d i ; suppose P n i = { T i 1 , T i 2 , … , T i n i } , f d i is expressed as Equation (2):
where L U i , T i 1 is the distance from the current location of U i to target T i 1 , ∑ k = 1 n i 2 π a r T i k represents the sum length of the circular reconnaissance route of targets, ∑ k = 1 n i − 1 L T i k , T i k + 1 represents the sum distances of transferring between targets, and L T i n i , S U i represents the flight distance of the UAV from the last target to its ship platform.
The leftover maximum range needs to be updated in real time. According to the discussion in Section 2.2.2 , the list of finished tasks of U i is T F i = { T F i 1 , T F i 2 , … , T F i n f i } , and the m r l i of U i is expressed as Equation (3):
where L S U i , T F i 1 represents the distance from the platform to the first finished target, and L T F i n f i , U i represents the distance from the last finished target to the current location of U i . If U i is exactly at the location of T F i n f i , then L T F i n f i , U i = 0 .
In order to ensure that U i can successfully complete the mission, it is required that the remaining flight distance of U i cannot be greater than its remaining maximum range:
(3) Time window constraint
Suppose that the time when a dynamic event happens is t d . According to P l a n n e w , each UAV can obtain the time period for reconnaissance of its targets. Take U i as an example, supposing P n i = { T i 1 , T i 2 , … , T i n i } . The start time of reconnaissance for T i j is t s i j , and the end time of reconnaissance for T i j is t e i j . Then, t s i j and t e i j are expressed as Equations (5) and (6):
If T j contains a time window constraint, t s i j and t e i j are required to satisfy the following constraints:
2.2.6. Cost Function
(1) Cost of multi-UAV formation
In order to intuitively evaluate the pros and cons of the final mission plan, we establish the cost function of UAV formation by referring to the previous literatures [ 22 , 36 ].
where CT represents the mission completion time, which is the moment that the UAV complete the last task; AT represents the average flight time—that is, the average time spent by each UAV from departure to return to the platform (except damaged UAVs); and α , β ∈ [ 0 , 1 ] are proportional coefficients satisfying α + β = 1 , based on the discussions in literatures [ 12 , 37 ], which are α = β = 0.5 here. Plans that do not satisfy the constraints cannot be used as the final mission plan, considering that a good mission plan should enable UAV formation to complete the task with less consumption. Referring to [ 36 ], γ × 10 4 is used to penalize the plans that do not satisfy the constraints in Section 2.2.5 . γ is the constraint factor, and the value of γ is 0 or 1: if the mission plan does not meet the constraints, γ = 1 , so that f c increases by 10 4 ; otherwise, γ = 0.
(2) Cost of single UAV
Due to the distributed architecture used in online task reassignment, each UAV cannot obtain the overall task mission plan. When updating its mission scheme, a single UAV cannot measure the merits of its scheme through the cost of UAV formation. Therefore, this paper introduces the single cost function to measure the cost of a single UAV. The cost of U i depends on its task scheme, denoted as c i , which is calculated by Equation (9):
where c t i represents the time from now to U i completing all tasks according to its scheme P i ; r t i represents the time from now to U i returning back to platform; ω 1 , ω 2 are proportional coefficients, ω 1 = ω 2 = 0.5 here. γ i is the constraint factor: if P i is satisfied with the constraints, γ i = 0 ; otherwise, γ i = 1 .
3. Two-Stage Distributed Task Assignment Algorithm Based on CNP
The advantages of the TS-DTA algorithm mainly include the following three aspects. The first is to achieve the assignment of multiple targets. The two-stage task assignment strategy can avoid the conflicts of multi-targets in the task allocation process, ensuring smooth task allocation. Secondly, tasks can be assigned efficiently. The algorithm is designed based on CNP. The original CNP is improved such that the TS-DTA algorithm can achieve rapid reassignment and ensure the quality of the solution to a certain extent. Thirdly, the communication burden of UAV formation is relatively small. By introducing the bidding benchmark and the bidding strategy based on route distance, the communication times of UAV formation during task assignment are reduced.
3.1. Tasks to Be Assigned
Task reassignment is carried out when some tasks cannot be completed due to dynamic events. When executing task reassignment, partial reassignment can be carried out on the basis of the previous mission plan, which can save computing resources and improve the speed of calculation [ 17 , 33 ]. Therefore, the TS-DTA algorithm proposed in this paper adopts the partial reassignment strategy—that is, only part of the targets that need to be reassigned are assigned and these targets are reasonably added to the existing task scheme of dispatched UAVs U d i s p a t c h .
According to the description in Section 2.1 , the targets directly related to dynamic events need to be reassigned, which should be added to the list to be assigned T L u n and removed from the current scheme of their corresponding UAVs. Removing some targets may lead to the reconnaissance time of subsequent targets violating the time window constraints, which will interfere with task reassignment. Therefore, it is necessary to remove the subsequent targets that do not meet the constraints from the current task scheme and add them to T L u n . These targets are called the additional targets of task reassignment. For example, the current task scheme of U i is T L i = { T L i 1 , T L i 2 , … , T L i n l i } . When T L i 2 needs to be reassigned, we remove T L i 2 from T L i ; so, T L i = { T L i 1 , T L i 3 , … , T L i n l i } , supposing that T L i 4 , T L i 6 contain time window constraints. According to the new task scheme, the reconnaissance time of T L i 4 , T L i 6 will be earlier than the beginning of the time window. Then, it is necessary to remove T L i 4 , T L i 6 from T L i to T L u n .
Based on the above discussion, the sources of T L u n include the leftover targets of damaged UAVs, new targets, the targets whose location changed, the targets whose time window changed, and additional targets. After a dynamic event occurs, the above targets need to be added to T L u n . The additional targets are confirmed by UAV formation during the task reassignment process.
3.2. The Manager UAV and Contractor UAV
When the contract net protocol is used for task assignment, UAVs obtain a conflict-free solution by negotiating with each other. During this period, a manager UAV U m needs to be specified as the manager in the negotiation process. The other UAVs of U d i s p a t c h are contractor UAVs, which are denoted as C U . C U bids for tasks issued by U m during the assignment process. In addition, in the algorithm proposed in this paper, the manager UAV U m itself also participates in the task bidding.
From the perspective of balancing the communication distance between UAVs, this paper takes the UAV closest to the center of dispatched UAV formation as the manager and the remaining UAVs as the contractor. During the mission, U m obtains the location and task execution process of each UAV in real time by communicating with C U and switches the manager’s identity in time according to the relative location between UAVs so as to dynamically update U m and C U .
3.3. The Framework of TS-DTA
Based on the previous discussion, some of the targets in T L u n may contain time window constraints. If the targets with time window constraints are assigned first, the previously assigned targets may violate time window constraints when other targets are inserted later. These targets need to be assigned again, thus affecting the smooth progress of task assignment. Therefore, this paper adopts the two-stage assignment strategy. Targets without time window constraints are assigned in the first assignment stage. On this basis, the second assignment stage is carried out to assign targets with time window constraints.
After manager UAV U m obtains the list of tasks to be assigned T L u n , it is first divided into two sub-lists according to whether the target contains a time window constraint: the task list without time window constraints is F T L u n ; the task list with time window constraints is W T L u n . At the same time, U m removes every target in T L u n from the existing scheme P i of the corresponding UAV U i to obtain the current mission plan, P l a n = { P 1 , P 2 , … , P n u } . In particular, for a damaged UAV U b , its task list P b needs to be emptied. The specific task assignment architecture is shown in Figure 1 .

The framework of TS-DTA.
The objective of the first assignment stage is to assign the targets in F T L u n to U d i s p a t c h . U m needs to determine the number of targets in F T L u n first. It needs to be disposed in two cases: If there is only one target T x in F T L u n , the bidding strategy with bidding benchmark is used for task assignment, as detailed in Section 3.4.2 . If there are n ( n ≥ 2 ) targets in F T L u n , the bidding strategy based on route distance is used for task assignment, as detailed in Section 3.4.3 . In addition, U m needs to add additional targets to W T L u n in the first assignment stage; the specific process is described in Section 3.4.2 and Section 3.4.3 .
The objective of the second assignment stage is to assign the targets in W T L u n to U d i s p a t c h . In the second stage, the cyclic bidding strategy based on task timing is used for task assignment, as detailed in Section 3.5 .
3.4. The First Assignment Stage
3.4.1. single-target insertion method.
Before we begin to introduce the strategies in the first assignment stage, we need to introduce the single-target insertion method. This method is designed to obtain the optimal new scheme B P i j and the minimum cost increment m d c i j for U i to insert T j into the current scheme P i . There may be several targets in P i already; thus, there are different positions of inserting T j into P i . The method is to traverse each insertable position of P i and measure the quality of insertion scheme by comparing the cost of U i . After the new target is inserted into the current scheme of U i , we can obtain a new task scheme of U i . The pseudo-code of this method is shown in Algorithm 1.
Based on the above discussion, before T j is inserted into P i , P i satisfies the constraint conditions. If m d c i j ≥ 10 4 , it means that the task allocation scheme does not satisfy the constraints after target T j is inserted into P i .
3.4.2. Bidding Strategy with Bidding Benchmark
The contract net protocol enables UAVs to negotiate with each other by simulating the bidding process of the market mechanism. One round of bidding includes four stages: initialization, task bidding, winning bids, and signing contracts [ 38 ]. The manager and each contractor need to communicate three times in every round of bidding. In this way, with the increase in the number of UAVs, the communication burden of U m is heavier, which reduces the stability of the UAV system. Therefore, this paper proposes a bidding strategy with a bidding benchmark, which requires U m to publish the bidding benchmark at the same time when publishing bidding information. Before bidding, every U i in C U compares its bid with the bidding benchmark. If its bid does not meet the bidding benchmark, U i directly abandons the bidding. In this strategy, the number of communications between UAVs can be reduced. The specific steps are as follows:
( 1 ) U m verifies whether P m meet constraints or not. If P m does not meet constraints, U m removes the targets with time window from P m into W T L u n . Then, U m finds the best scheme B P m and the minimum cost increment m d c m by inserting T x into P m by single-target insertion method, and the m d c m acts as bidding benchmark. At last, U m sends T x , m d c m , and P l a n to every UAV of C U .
(2) After U i ( U i ∈ C U ) receives the bidding information sent by U m , U i first verifies whether P i meets the constraints or not. If P i does not meet the constraints, U i removes the targets with time window from P i into W T i , which will be sent to U m later. Then, U i find the best scheme B P i and the minimum cost increment m d c i of inserting T x into P i by single-target insertion method. At last, U i compares m d c i with m d c m . If m d c i is smaller than m d c m , and m d c i is smaller than 10 4 , then U i sends B P i , m d c i , and W T i to U m ; otherwise, U i sends W T i to U m and gives up the bidding.
(3) After U m receives the bidding information sent by C U , U m puts the additional targets in all received W T i into W T L u n . If all U i in C U give up the bidding and m d c m is smaller than 10 4 , T x is assigned to U m . If all U i in C U give up the bidding and m d c m is bigger than 10 4 , T x fails to be assigned. Otherwise, U m compares all received m d c and finds the U b e s t with the min m d c , assigns T x to U b e s t , updates the task scheme of U b e s t ( P b e s t = B P b e s t ), sends the losing signal to those U i that participated in the bidding (except U b e s t ), and sends the winning signal to U b e s t .
According to the bidding strategy with bidding benchmarks, when the contractor UAV in C U finds that its bid exceeds the bidding benchmark, it directly abandons the bidding, and the U m no longer needs to transmit the information of bidding failure to it. The pseudo-code is shown in Algorithm 2.
The ‘Parallel’ in the pseudo-code indicates that the calculation of each UAV is concurrent. This is because the UAV formation adopts a distributed architecture; so, calculation can be carried out independently based on the computing resources of each UAV. Therefore, the calculation of each UAV is in no order and they do not interfere with each other.
3.4.3. Bidding Strategy Based on Route Distance
When there are multiple targets to be allocated, there will be repeated communications between U m and C U , if targets are tendered one by one. As the number of targets and UAVs increases, the communication burden will be heavy and the stability will be poor. In order to better complete synchronous assignment of multiple targets, this paper proposes a bidding strategy based on route distance. In this strategy, U m assigns bids according to the relative distance between the remaining waypoints of U d i s p a t c h (including U m ) and the targets to be allocated. The specific steps are as follows:
(1) U m sends F T L u n , P l a n to every UAV of C U first, then verifies whether P m meet the constraints or not. If P m does not meet constraints, U m removes the targets with time window from P m into W T L u n . Finally, the distance from each route point contained in P m to each target point in F T L u n is calculated, and the distance matrix D T m is obtained.
(2) After receiving the bidding information sent by U m , U i ( U i ∈ C U ) first verifies whether P i meets the constraints or not. If P i does not meet constraints, U i removes the targets with time window from P i into W T i , which will be sent to U m later. Then, U i calculates the distance of every route point in P i to each target in F T L u n and obtains the distance matrix D T i . Finally, the D T i and W T i are sent to the manager UAV U m .
(3) After U m receives the bidding information sent by C U , U m puts the additional targets in all received W T i into W T L u n . Then, all the distance matrices (including D T m ) are processed to obtain the task assignment scheme, A s s i g n = { A 1 , A 2 , … , A n } . Assign is a two-dimensional list, in which the elements in sub-list A j are the serial numbers of UAVs in U d i s p a t c h . The serial numbers are arranged according to the minimum route distance from each UAV to the target T j in ascending order.
(4) U m assigns targets to UAVs according to A s s i g n . At the k t h assignment (first set k = 1), U m directly assigns each target to the k t h UAV in the corresponding sub-list of A s s i g n for bidding. Thus, U m obtains the assigned task list A S T L k = { A L k 1 , A L k 2 , … , A L k n d } . Then, U m sends the A L k i to each corresponding UAV U i and processes the task list assigned to itself.
(5) After U i ( U i ∈ U d i s p a t c h ) receives A L k i , for every task T j in A L k i , the single-target insertion method is adopted to find the optimal scheme B P i j and the minimum cost increment m d c i j of inserting T j into P i . If m d c i j is smaller than 10 4 , update the task scheme of U i ( P i = B P i j ), remove T j from A L k i , and try to insert the next target in A L k i . Otherwise, try to insert the next target in A L k i directly. After all the targets in A L k i are traversed once, the remaining A L k i is sent back to U m .
(6) After obtaining feedback from all U d i s p a t c h , U m merges the targets in all A L k i into a new F T L u n . Then, it is judged whether F T L u n is an empty set: if it is empty, the assignment of F T L u n is completed; if not empty, let k = k + 1 , and then repeat steps (3)–(5). Continue this process until F T L u n is an empty set, meaning the task assignment is successful; otherwise, if k > n d ( n d is the number of dispatched UAVs), it means the remaining targets in F T L u n failed to be assigned.
According to Formula (9), for targets without a time window constraint, the main factor affecting the assignment result is distance. From the perspective of reducing flight distance of UAVs, the target should be assigned to the UAV with the smallest flight distance added by completing the target. Therefore, the bidding strategy based on route distance is proposed. The manager U m directly assigns UAVs to bid for targets, which ensures the quality of the task scheme while reducing communication burden. The pseudo-code is shown in Algorithm 3.
3.5. The Second Assignment Stage
The second assignment stage mainly relies on the cyclic bidding strategy based on task timing to complete the task assignment since targets in W T L u n are constrained by time windows, and the end times of time windows are different. The end time of the time window of T j is denoted as t w e j . It is a better choice to first assign the targets with an earlier end time of time window. Otherwise, some subsequent targets may need to be inserted ahead of the targets assigned previously. This insertion would change the mission process. As a result, the reconnaissance time of previously assigned tasks may not satisfy its time window constraint. In order to ensure that the task assignment can be carried out more smoothly, the targets in W T L u n are firstly sorted according to the end time of time window, and then allocated one by one. At the same time, after the post-order targets are assigned, the pre-order targets that fail to be assigned could be successfully allocated. In order to enable more targets to be successfully assigned, we use a cyclic bidding method. In addition, in order to reduce the communication burden and improve the efficiency of assignment, similar to Section 3.4.1 , the cyclic bidding strategy introduces a bidding benchmark when assigning each target in W T L u n . The specific process is as follows:
(1) U m finds the best scheme B P m k and the minimum cost increment m d c m k of inserting the k t h (first set k = 1) target in W T L u n into P m by single-target insertion method. The m d c m k acts as bidding benchmark. Then, U m sends T w k , m d c m k , and P l a n to every UAV of C U .
(2) After receiving the bidding information sent by U m , U i ( U i ∈ C U ) finds the best scheme B P i k and the minimum cost increment m d c i k of inserting T w k into P m by single-target insertion method. Then, U i compares m d c i k with m d c m k . If m d c i k is smaller than m d c m k , and m d c i k is smaller than 10 4 , then U i sends B P i k and m d c i k to U m ; otherwise, U i sends a give up signal to U m and gives up the bidding.
(3) After U m receives the bidding information sent by C U , U m compares all received m d c and finds the U b e s t with the min m d c ; then, it assigns T w k to U b e s t , updates the task scheme of U b e s t ( P b e s t = B P b e s t ), sends losing signal to those U i that participated in the bidding (except U b e s t ), and sends winning signal to U b e s t . Then, T w k is removed from W T L u n . If all U i in C U give up the bidding and m d c m k is smaller than 10 4 , T w k is assigned to U m .
(4) Repeat steps (1)–(3) (increase k by 1 each time) until all targets in W T L u n complete a traversal.
(5) Determine whether W T L u n is an empty set: if yes, the task allocation is complete; otherwise, it is judged whether the target in W T L u n is consistent with the target after the last traversal. If not, let k = 1 and repeat steps (1)–(4); if yes, it means that the existing tasks in W T L u n can no longer be successfully assigned, the second assignment stage is terminated, and targets in W T L u n failed to be assigned.
The pseudo-code of this strategy is shown in Algorithm 4.
4. Performance Analysis of TS-DTA
In order to comprehensively analyze the performance of the TS-DTA algorithm, a series of experiments are conducted based on the DE-MCRTR model. All algorithms are implemented in Python 3.9, the IDE is PyCharm, the computer CPU is an AMD Ryzen 5-5600H, and the CPU clock speed is 3.30 GHz. The distance unit in the text is kilometer (km) and the time unit is second (s). In order to simplify the expression, the units are omitted in the following text.
4.1. Validation of Effectiveness
4.1.1. background information.
In order to verify the effectiveness of the TS-DTA algorithm in the DE-MCRTR model, we conducted a set of simulation experiments. Referring to existing literature [ 12 , 22 , 37 ], this article assumes that there are four ship platforms, each equipped with two UAVs. The cruising speeds and maximum ranges of different types of UAVs are different. The ship platforms are distributed in the area of [ 0 , 100 ] × [ 0 , 100 ] ; we randomly initialize the location of the four platforms. The initialization information and related parameters are shown in Table 1 .
Initialization information of platforms and UAVs.
The targets are distributed in the area of [ 100 , 300 ] × [ 100 , 300 ] . The radius of the circular routes of targets are initialized randomly within [ 1 , 3 ] . We assume that there are twenty targets, of which five targets contain time window constraints. Similarly, this article randomly initializes the locations of the twenty targets within the given range and randomly selects five targets to set the time window constraints. The initialization information of targets is shown in Table 2 .
Initialization information of targets.
Before the mission starts, the offline task assignment algorithm is first used to obtain the initial mission plan: P l a n = [[2, 13, 5, 4], [6, 15, 12], [1, 14], [7, 16, 17, 18], [], [], [8, 19, 9], [0, 10, 11, 3]]. The P l a n is a two-dimensional list, where the sub-list represents the scheme of each UAV. The numbers in the sub-list represent the targets’ number. The same is true later. According to the initial mission plan, a total of six UAVs are dispatched to carry out the reconnaissance mission: U d i s p a t c h = [ U 0 , U 1 , U 2 , U 3 , U 6 , U 7 ] , n d = 6 . The initial situation and the initial mission plan are shown in Figure 2 a,b. The numbers next to the targets icon indicate targets’ number, the same is true later.

( a ) Initial situation. ( b ) Initial mission plan.
4.1.2. Task Reassignment in the Case of UAV Damage
To verify the effectiveness of the TS-DTA algorithm in the case of UAV damage, test 1 is conducted. The moment when the drone departs from the ship platform is t = 0. Assuming t = 1200, U 1 is attacked by the enemy and loses the ability to execute tasks. In the simulation experiment, the location and task execution status of each UAV is calculated based on the initial mission plan. By this way, the finished task list of UAV formation is T F = [ [ 2 ] , [ ] , [ 1 ] , [ 7 , 16 ] , [ ] , [ ] , [ 8 ] , [ 0 , 10 ] ] , the leftover task list of UAV formation is T L = [ [ 13 , 5 , 4 ] , [ 6 , 15 , 12 ] , [ 14 ] , [ 17 , 18 ] , [ ] , [ ] , [ 19 , 9 ] , [ 11 , 3 ] ] , and T L 1 = [ 6 , 15 , 12 ] is the leftover task list of U 1 . The tasks in T L 1 need to be assigned to U d i s p a t c h . So, the list of tasks to be assigned is T L u n = [ 6 , 15 , 12 ] , and U d i s p a t c h = [ U 0 , U 2 , U 3 , U 6 , U 7 ] . The current battlefield situation is shown in Figure 3 a.

( a ) The battlefield situation of test 1. ( b ) Result of task reassignment in test 1.
In Figure 3 , the green circular icons represent the targets that have been reconnoitered, the blue circular icons represent the targets that have not been finished, the gray circular icons represent the targets that have changed, and the solid lines of different colors represent the remaining flight routes of UAVs according to the current mission plan. The UAVs that have not been given a task are still located on ship platforms; so, the icons of these UAVs and ship platforms overlap.
Run the TS-DTA algorithm to assign tasks in T L u n . The new mission plan is P l a n n e w = [[13, 5, 4], [], [14, 6], [17, 18, 12, 15], [], [], [19, 9], [11, 3]. The cost of multi-UAV formation is f c = 2051.28 . So, T 6 is assigned to U 2 , and T 12 , T 15 are assigned to U 3 . According to P l a n n e w , the remaining routes of UAVs are shown in Figure 3 b. The reconnaissance schedules of targets are shown in Figure 4 . The green icons represent the reconnaissance time of the targets that have been reconnoitered, and the blue icons represent the reconnaissance time of the targets that will be reconnoitered. The same is true later.

Reconnaissance schedules in test 1.
From Figure 3 b, we can find that T 6 will be reconnoitered by U 2 and T 12 , T 15 will be reconnoitered by U 3 . Combining Table 2 and Figure 4 , P l a n n e w can ensure that all targets with time windows are reconnoitered within the time window.
According to P l a n n e w , T 6 is reconnoitered after T 14 in the scheme of U 2 . In Figure 5 , there are two possible routes for U 2 to finish T 6 and T 14 . One is the shorter route, shown by the green dotted line, where the start and end times of the U 2 reconnaissance of T 14 are marked in green font in the figure. Another is the actual route, shown by the brown solid line, where the start and end times of the U 2 reconnaissance of T 14 are marked in brown font in the figure. t s i j represents the U i start time to reconnoiter T j ; t e i j represents the U i end time reconnoitering T j . From Figure 5 , we can find that in the shorter route T 6 is reconnoitered before T 14 . However, if the shorter route is adopted, t s 2 14 = 1624.95 and t e 2 14 = 1701.89 , which obviously contradicts T W 14 = [ 1000 , 1600 ] . So, the shorter route (green dotted line) is abandoned.

Routes comparison.
4.1.3. Task Reassignment in the Case of New Target Occurrence
To verify the effectiveness of the TS-DTA algorithm in the case of finding new targets, test 2 is conducted. Suppose that at t = 1300, the early warning aircraft detects three new targets: T n 1 , T n 2 , and T n 3 . The location of T n 1 is L O C T n 1 = [217.00, 153.00], the radius of the annular route a r T n 1 = 1.50, and the reconnaissance time window is T W T n 1 = [ 1500 , 1800 ] . The location of T n 2 is L O C T n 2 = [130.00, 206.00], and the radius of the annular route a r T n 2 = 2.30, without a reconnaissance time window. The location of T n 3 is L O C T n 3 = [241.00, 263.00], and the radius of annular route a r T n 2 = 1.90, without a reconnaissance time window.
According to Section 2.2.3 , new targets need to be added into the original target set T . The original target number is 20, numbered from 0 to 19. So, T n 1 is numbered 20, denoted as T 20 . Similarly, T n 2 and T n 3 are numbered 21 and 22, which are denoted as T 21 and T 22 , respectively. The current battlefield situation is shown in Figure 6 a.

( a ) The battlefield situation of test 2. ( b ) Result of task reassignment in test 2.
The list of tasks to be allocated is T L u n = [ 20 , 21 , 22 ] . The UAVs participating in task reassignment are U d i s p a t c h = [ U 0 , U 1 , U 2 , U 3 , U 6 , U 7 ] . The finished task list of UAV formation is T F = [ [ 2 ] , [ ] , [ 1 ] , [ 7 , 16 ] , [ ] , [ ] , [ 8 ] , [ 0 , 10 ] ] , and the leftover task list of UAV formation is T L = [ [ 13 , 5 , 4 ] , [ 6 , 15 , 12 ] , [ 14 ] , [ 17 , 18 ] , [ ] , [ ] , [ 19 , 9 ] , [ 11 , 3 ] ] .
Run the TS-DTA algorithm to obtain the new task plan: P l a n n e w = [[13, 5, 4], [6, 20, 15, 12], [14], [17, 18], [], [], [19, 21, 9], [11, 22, 3]]. The cost of multi-UAV formation is f c = 2166.98 . According to P l a n n e w , T 20 is assigned to U 1 , T 21 is assigned to U 6 , and T 22 is assigned to drone U 7 . The result is shown in Figure 6 b. The reconnaissance schedules of targets are shown in Figure 7 . Analysis shows that T 21 , T 22 are assigned through bidding strategy based on route distance. So, T 21 and T 22 are assigned to U 6 and U 7 , respectively, which are judged from the route distance.

Reconnaissance schedules in test 2.
It is reasonable to assign to U 1 and U 2 from the perspective of flight distance. However, T 20 needs to be completed within the time window of [ 1500 , 1800 ] , which conflicts with the time window of T 14 that belongs to U 1 . So, T 20 is finally assigned to U 2 .
4.1.4. Task Reassignment in the Case of Changing the Location of Targets
To verify the effectiveness of the TS-DTA algorithm in the case of changing the location of targets, test 3 is conducted. It is assumed that at time t = 1100, the early warning aircraft detects that four targets have moved to new locations as follows: T 4 moves from [ 184.89 , 215.84 ] to [157.00, 198.00], T 9 moves from [ 109.69 , 185.35 ] to [105.00, 210.00], T 14 moves from [ 193.87 , 108.35 ] to [194.00, 132.00], and T 17 moves from [ 260.90 , 226.18 ] to [250.00, 256.00]. The list of tasks to be allocated is T L u n = [ 4 , 9 , 14 , 17 ] . Among them, T 4 and T 14 contain time window constraints, and T 9 and T 17 do not contain time window constraints. The current battlefield situation is shown in Figure 8 a.

( a ) The battlefield situation of test 3. ( b ) Result of task reassignment in test 3.
The lines in Figure 8 a represent the original planned routes of UAVs. Because the locations of T 4 , T 9 , T 14 , and T 17 are changed, UAVs can no longer finish the reconnaissance of these moved targets according to the original planned route. So, we need to reassign these moved targets and update the flight routes according to P l a n n e w to ensure that all tasks can be completed. Now, the finished task list of UAV formation is T F = [ [ ] , [ ] , [ ] , [ 7 ] , [ ] , [ ] , [ ] , [ 0 ] ] , and the leftover task list of UAV formation is T L = [[2, 13, 5], [6, 15, 12], [1], [16, 18], [], [], [8, 19], [10, 11, 3]]. The UAVs participating in the assignment are U d i s p a t c h = [ U 0 , U 1 , U 2 , U 3 , U 6 , U 7 ] .
Run the TS-DTA algorithm to obtain the new task plan: P l a n n e w = [[2, 4, 13, 5], [18, 6, 15, 12], [1, 14], [16], [], [], [8, 19, 9], [10, 11, 17, 3]]; T 4 , T 9 , T 14 , T 17 are assigned to U 0 , U 6 , U 2 , U 7 , respectively. The cost of multi-UAV formation is f c = 2440.83 . The remaining routes are shown in Figure 8 b, and the reconnaissance schedules of targets are shown in Figure 9 . Although T 9 and T 14 have moved, the range of motion is not large; thus, they are assigned to the original UAV and the task orders are not changed. As for T 4 , the time window constraint cannot be satisfied due to the change in location. After reassignment, the task execution order of U 0 is adjusted to ensure that T 4 is reconnoitered within its time window.

Reconnaissance schedules in test 3.
For U 3 , because the location of T 17 is changed, the algorithm first removes T 17 from the task list of U 3 , which leads to the advance in the reconnaissance time of T 18 . As a result, the time window of T 18 cannot be satisfied. So, T 18 is the additional target, which should be added to T L u n . Finally, T 18 is assigned to U 0 , and T 17 is assigned to U 7 , which is nearer to T 17 . According to P l a n n e w , U 0 first reconnoiters T 18 and then performs subsequent tasks. By this way, the completion time of subsequent tasks are delayed; however, the time window constraints of all targets are satisfied.
4.1.5. Task Reassignment in the Case of Changing the Time Window of Targets
To verify the effectiveness of the TS-DTA algorithm in the case of changing the time window of targets, test 4 is conducted. Assuming that at time t = 1250 , the time windows of T 4 and T 18 are changed. The new time windows are T W 4 = [ 1400 , 1700 ] and T W 18 = [ 1300 , 1600 ] . The current battlefield situation is shown in Figure 10 a.

( a ) The battlefield situation of test 4; ( b ) Result of task reassignment in test 4.
Now, the finished task list of UAV formation is T F = [[2], [], [1], [7, 16], [], [], [8], [0, 10]] and the leftover task list of UAV formation is T L = [[13, 5], [6, 15, 12], [14], [17], [], [], [19, 9], [11, 3]]. According to the initial mission plan, the start and end times of reconnaissance for T 4 and T 18 are [ 1717.29 , 1747.38 ] and [1661.72, 1728.01], which obviously does not meet the new time window constraints. So, the list of tasks to be allocated is T L u n = [ 4 , 18 ] , and the UAVs participating in the assignment are U d i s p a t c h = [ U 0 , U 1 , U 2 , U 3 , U 6 , U 7 ] .
Run the TS-DTA algorithm to obtain a new mission plan: P l a n n e w = [[13, 4, 5], [6, 15, 12], [14], [18, 17], [], [], [19, 9], [11, 3]]. The cost of multi-UAV formation is f c = 1958.39 . The results are shown in Figure 10 a and Figure 11 . According to the initial plan, the task scheme of U 0 is P 0 = [ 2 , 13 , 5 , 4 ] and the task scheme of U 3 is P 3 = [ 7 , 16 , 17 , 18 ] . So, in the initial plan, T 4 belongs to U 0 and T 18 belongs to U 3 . It can be seen from P l a n n e w that both T 4 and T 18 are assigned to the UAV they originally belonged to. However, compared with the initial plan, the orders of tasks in P 0 and P 3 have changed. According to P l a n n e w , U 0 reconnoiters T 4 and then reconnoiters T 5 , and U 3 reconnoiters T 18 and then reconnoiters T 17 . This is because the time windows of T 4 and T 18 have advanced.

Reconnaissance schedules in test 4.
4.2. Comparative Analysis
4.2.1. analysis of communication simplification effect.
The communication times mean the total times that UAVs communicate with each other during the process of task assignment. This paper reduces the communication times of UAV formation by introducing a bidding benchmark and assignment strategy based on route distance into the TS-DTA algorithm. Gao et al. [ 34 ] proposed a CNP-based algorithm to solve the task reassignment problem, in which targets are allocated one by one. In order to analyze the simplification effect of the TS-DTA algorithm on the communication process, we carried out some comparative experiments. Since the CNP-based algorithm [ 34 ] is only applicable to the two cases of UAV damage and new target occurrence, we only consider the above two dynamic events when setting up comparative experiments.
In the experiment, we randomly generate some targets that need to be reconnoitered in the range of [ 100 , 300 ] × [ 100 , 300 ] as new targets. The specific data are shown in Table 3 .
Data of new targets.
We conducted the following three sets of tests: UAV damage, new target appearance, and new target appearance at the same time as UAV damage. Experiments are based on the initial mission plan described in Section 4.1.1 , and different dynamic events are introduced for comparative experiments.
The dynamic events are introduced at time t = 1000 in the first set of experiments, recorded as test 5. The leftover task list of UAV formation is T L = [[2, 13, 5, 4], [6, 15, 12], [1, 14], [16, 17, 18], [], [], [8, 19, 9], [10, 11, 3]]. By changing the serial number and numbers of damaged UAVs, comparative experiments are carried out. The experimental results are shown in Table 4 . In the table, n d represents the number of UAVs in U d i s p a t c h and n u n represents the number of targets to be allocated.
Statistics of communication times in test 5.
It can be seen from the results that under various experimental conditions, the communication times of the CNP-based algorithm are greater than those of the TS-DTA algorithm. It is noted that the communication times of the TS-DTA algorithm are not stable even if n d and n u n are constant, which is mainly caused by three reasons: First, the bidding benchmark is introduced in the algorithm and the number of contractors that meet the bidding benchmark in the bidding process is not certain. Second, the number of assignments in the bidding strategy based on the route distance is not stable. Third, the number of cycles of the cyclic bidding strategy based on task timing is not stable.
The dynamic events are introduced at time t = 1200 in the second set of experiments, recorded as test 6. The leftover task list of UAV formation is TL = [[13, 5, 4], [6, 15, 12], [14], [17, 18], [], [], [19, 9], [11, 3]]. By introducing different numbers of new targets for comparative analysis, the experimental results are shown in Table 5 . It can be seen from the results that as the number of new targets increases, the communication times of the CNP-based algorithm increases linearly. However, the communication times of the TS-DTA algorithm are significantly less than those of the CNP-based algorithm, and as the number of targets increases, the advantage is more obvious.
Statistics of communication times in test 6.
The dynamic events are introduced at time t = 1200 in the third set of experiments, recorded as test 7. A comparative analysis was performed by changing the number of damaged UAVs and the number of new targets. The experimental results are shown in Table 6 . It can be seen from the results that the number of communication times of the TS-DTA algorithm is significantly lower than that of the CNP-based algorithm in various cases.
Statistics of communication times in test 7.
4.2.2. Analysis of Solution Speed and Solution Quality
In order to analyze the solution speed and solution quality of the TS-DTA algorithm, we conducted a set of comparative experiments. In addition to the CNP-based algorithm mentioned in Section 4.2.1 , we add two centralized task assignment algorithms for comparison, including RPSO [ 39 ] and IEPPSO [ 22 ]. The solution speed and solution quality of RPSO and IEPPSO are related to the population size of particles. In order to analyze the performance of the algorithm more comprehensively, the task assignment effects of RPSO and IEPPSO algorithms with population sizes of 100, 300, and 500 are compared in each experiment. In the experiment, the number of iterations of the centralized algorithm is set to 200.
In the experiment, the number of targets to be reassigned is set to 2, 4, 6, 8, and 10, respectively. The performance is analyzed by comparing the CPU running time ( t c p u ) and the overall cost of UAV formation ( f c ) in various cases. Due to the randomness of the results of RPSO and IEPPSO algorithms, in order to ensure the objectivity of experiments, the RPSO and IEPPSO algorithms are run 20 times in each test, and the average of the 20 results are taken as the final result. The results are shown in Table 7 .
The CPU running time and the overall cost of UAV formation.
According to the results of Table 7 , the paper draws a line chart of CPU running time changing with the number of targets to be allocated, as shown in Figure 12 , and draws a line chart of overall cost changing with the number of targets to be allocated, as shown in Figure 13 .

CPU running time.

Cost of UAV formation.
From Figure 12 , we can intuitively see that the CPU running time of the TS-DTA algorithm and the CNP-based algorithm is the shortest, followed by the RPSO algorithm, and that of the IEPPSO algorithm is the longest. As the population size increases, the time consumption of the RPSO and IEPPSO algorithms increase. Based on the experimental results in Section 4.2.1 , the CNP-based algorithm requires a large amount of communication for task assignment. In the experiment, we did not consider the time cost of communication, and a large amount of communication will lead to a slower solution speed in actual task assignment.
From Figure 13 , we can see that as the number of targets increases, the solving ability of the RPSO algorithm becomes weaker and the proportion of solutions that do not meet the constraints becomes higher, resulting in an overall higher cost value. The solving ability of the IEPPSO algorithm is relatively stable, and when the population size is 500, the solution of IEPPSO algorithm is optimal in various situations. However, combined with Figure 12 , we find that the CPU running time of the IEPPSO algorithm significantly increases with the increase in the number of targets, which reflects that the IEPPSO algorithm improves the quality of the solution by increasing the computational load. So, the IEPPSO algorithm is not applicable in dynamic environments with high requirements for solving speed. Besides, the quality of solutions of the TS-DTA algorithm and the CNP-based algorithm are similar, and there is not much difference compared with the IEPPSO algorithm with a population size of 500.
Finally, considering the solving speed, communication burden, and solution quality, the TS-DTA algorithm is more suitable for solving the task reassignment problem in dynamic environments.
5. Conclusions and Future Work
In this paper, a model of multi-UAV cooperative reconnaissance task reassignment is established to comprehensively consider many dynamic events including UAV damage, new target occurrence, location change of the target, and time window change of the target. Then, a two-stage distributed task assignment algorithm (TS-DTA) based on the improved contract net protocol is presented to realize the rapid reassignment of multiple targets, reduce the communication burden of multi-UAV formation, and ensure the quality of task assignment to a certain extent. Finally, the experimental results show that the proposed TS-DTA algorithm can efficiently solve the task reassignment problem in dynamic environments while effectively reducing the communication burden of UAV formation.
Our future works will focus mainly on the two following aspects. Firstly, the TS-DTA algorithm will be further optimized to improve efficiency. Secondly, the task assignment and reassignment of reconnaissance UAVs and attack UAVs in mixed tasks will be further studied.
Funding Statement
This research was funded by the National Natural Science Foundation of China under Grant 62102268, the Stable Supporting Program for Universities of Shenzhen under Grant 20220812102547001, the Research Foundation of Shenzhen Polytechnic University under Grants 6022312044K and 6023310030K, and Natural Science Foundation of Hubei Province (No.2019CFB627).
Author Contributions
Conceptualization, X.L. and G.W.; methodology, X.L. and G.W.; software, G.W.; validation, X.Y.; formal analysis, G.W.; investigation, G.W. and X.Y.; resources, X.L.; data curation, G.W.; writing—original draft preparation, G.W.; writing—review and editing, X.L.; visualization, G.W.; supervision, X.L.; project administration, X.L.; funding acquisition, X.Y. All authors have read and agreed to the published version of the manuscript.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Data availability statement, conflicts of interest.
The authors declare no conflict of interest.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
- Skip to main content
- Skip to primary sidebar
Association for the Advancement of Artificial Intelligence
Subdimensional Expansion and Optimal Task Reassignment
February 1, 2023
Glenn Wagner,Howie Choset,Nora Ayanian
Carnegie Mellon University,Carnegie Mellon University,Massachusetts Institute of Technology
Proceedings:
Proceedings of the International Symposium on Combinatorial Search, 5
Vol. 5 No. 1 (2012): Fifth Annual Symposium on Combinatorial Search
Short Papers
Multirobot path planning and task assignment are traditionally treated separately, however task assignment can greatly impact the difficulty of the path planning problem, and the ultimate quality of solution is dependent upon both. We introduce task reassignment, an approach to optimally solving the coupled task assignment and path planning problems. We show that task reassignment improves solution quality, and reduces planning time in some situations.
10.1609/socs.v3i1.18261
Privacy Overview
- Documentation
- Discussions
Task reassignment allows a DocuSign CLM administrator to change the ownership of an existing workflow task.
Reassigning a workflow task is a two-part process. For an administrator to be able to reassign a task assigned to a specific user, they must first have (a) access to both the inbox of the user who currently owns the task and (b) the user they wish to assign the task to. Completing these steps will allow an administrator to freely move tasks between inboxes.
Part 1: Set the Managed By field
An administrator must manage the task owner to see their assigned items. This is set in the Address Book by taking the following steps:
- Navigate to the Address Book from the top navigation menu.
- Find and click on the owner’s name to edit their user record.
- Complete the Managed By field by entering the name of the administrator who will reassign the task.
- Repeat steps 2 and 3 for the new task assignee.
- Save the changes. Upon returning to the Tasks page, you will now see the My Managed Users inbox.
Part 2: Reassign the task
- Under the My Managed Users list, find the user whose task you wish to reassign. Once you’ve selected the user, you will see their list of tasks populate on the main window pane to the right.
- Select the tasks you wish you transfer. Note : You can select all tasks in that user’s queue by clicking the top-level column check box.
- From the utility menu icon, select Reassign . From the reassign page, simply select the new task assignee to complete the transfer. Note : If you are not yet using the new task inbox, select Manage > Reassign from the menu bar.
All selected tasks will now appear in the new assignee’s inbox. Note: Be mindful of workflows that contain multiple steps requiring action by the same assignee. These tasks may need to be reassigned multiple times to complete the workflow.
Task Group Tasks Management

Knowledge Base
- Working with Your Projects
Reassigning Tasks & Milestones

Get in Touch
Task Reassignment (Company and Project)
When a user with assigned tasks is removed from a project, you (Company Administrator, Project Administrator, or Administrator user) can reassign the removed user's tasks to an active user.
Note : In this scenario, you can only reassign tasks that have not been started, or tasks that are in progress.
In the case of a dynamic assignment (when a workflow is routed back to the previous step, and the task on that step was assigned to the removed user), the system lets you send the task to the new active user. This also applies in a situation in which a record must be sent back for review.
To reassign a task from a removed user to an active user:
- Go to Company Workspace tab ( Admin mode).
- Click to expand User Administration .
- Click to expand Task Reassignment .
There are two sub-nodes under the Task Reassignment node:
Active User Tasks
Inactive User Tasks
The following explains each sub-node in details.
In This Section
Reassigning Tasks (Workflow)
Reassigning Tasks (Scenarios)
Workflow of Reassigning Tasks (Company)
Workflow of Reassigning Tasks (Project)
Reassigning Tasks Access Control
New Assignee Email Notifications
Last Published 12/7/2022
Last Published Wednesday, December 7, 2022
Extensions of Receding Horizon Task Assignment for Area Coverage in Dynamic Environments
Ieee account.
- Change Username/Password
- Update Address
Purchase Details
- Payment Options
- Order History
- View Purchased Documents
Profile Information
- Communications Preferences
- Profession and Education
- Technical Interests
- US & Canada: +1 800 678 4333
- Worldwide: +1 732 981 0060
- Contact & Support
- About IEEE Xplore
- Accessibility
- Terms of Use
- Nondiscrimination Policy
- Privacy & Opting Out of Cookies
A not-for-profit organization, IEEE is the world's largest technical professional organization dedicated to advancing technology for the benefit of humanity. © Copyright 2024 IEEE - All rights reserved. Use of this web site signifies your agreement to the terms and conditions.

What can we help you with?
- Axxess Home Care
- Home Care Implementation
- Signing In and Out
- System Setup
- Edit Profile
- Reset Signature
- Manage Company Information
- HITRUST FAQs
- CHAP Verified FAQs
- ACHC Certified FAQs
- Video – Scheduling for Administrators
- Video – Tracking Intake and Referrals
- Scheduling New Client Task
- Intake / Scheduling FAQs
- Billing Center Overview
- Adjustment Codes
- Video – Payor Setup and Billing
- Posting Managed Care Payments
- Paraprofessional Care Plan
- Comprehensive Plan of Care
- Paraprofessional Documentation
- Creating a New Order
- Video – HomeCare | Mobile App
- Communication Note
- Video – Understanding Clinical/Non-Clinical Planner
- Video – Continuous Care Note Documentation
- Facility Information
- Physician Information
- Employee Information
- Video – Orders Management
- Document Upload Types
- Immunization Profile
- Video – Completing Payroll
- Video – Client and Patient Chart Review
- Edit Client
- Video – Add a New User
- HomeCare eMAR Chart Tutorial
- Video – Agency Reports
- Video – OASIS Functionality and Export
- Video – Alert Center Setup
- Family Portal
- Video – Quality Assurance (QA) Center
- Clerical FAQs
- Video – HomeCare Mobile and EVV
- HomeCare Electronic Visit Verification (EVV)
- HomeCare Android Overview
- HomeCare iOS Overview
- CareBridge EVV Integration
- CareBridge EVV Integration Update in Wyoming
- EVV Exception Center
- EVV Payer ID
- HHAeXchange EVV Integration
- Forcura Document Management
- Sandata EVV Integration
- Tellus EVV Integration
- WorldView Document Management
- Training Videos
- Training Manuals
- Add Task Time to Daily Living Tasks
- Load Previous Notes Permissions Update
- Alert Center Updates
- Incident Log Updates
- Download Client Chart
- Mobile Client Chart Updates
- Daily Living Task Alerts
- Mobile Navigation Updates
- Unassign Client Tasks When Schedule Overlaps
- New Scheduling Features
- Add CARCs and RARCs to Claim Adjustments
- Filter Claims by Authorization Status
- Mobile Wound Documentation
- Multiple Payers on Remittance Advice
- General Ledger Report Updates
- Medication Alerts
- Alert Center Notes
- Authorization Manager
- Employee Proximity Mapping
- Mileage and Travel Time Types
- Suppress Client Information on Invoices
- Payroll Classifications
- Filter by Tags in Organization Schedule
- Filter by Tags in Caregiver Matching
- Link Visit Documentation to Claims and Invoices
- Pay Period Split by Day and Time
- Other Order Delivery Method
- Client Deposit Balance Report
- Missed Visits on Mobile
- Staffing Invoice Update
- Mobile eTAR Addendum
- Mileage and Travel Time Calculator Enhancements
- Wound Flowsheets Quick Report
- Physician Portal Updates
- Resubmitted Claims on Claim & Invoice Activity Report
- Mobile eMAR Addendum
- Physician Portal
- Pediatric Fall Risk Assessment
- Visit Export Report (HHAeXchange)
- Mileage and Travel Time Calculator
- COVID-19 Vaccine Dose Updates
- Meal Breaks
- Family Portal Invoices Update
- Load Previous Notes
- Billable Mileage
- Physician Signature Not Required
- Client Insurance Updates
- Invoice Refunds
- Fee-Based Authorization
- Create New Inquiry
- Links in Orders Management
- Private (Self) Pay in Payment Sources
- Payroll Shift Differentials
- Payroll Task Details
- Orders Management Notes
- Fall Risk and Supply Worksheet in Assessments
- Revenue Custom Account in COA Mapping
- Client Contacts Update
- Mobile Physician Order Addendum
- Pay Rates by Location
- EVV Log Updates
- Unbilled Accounts Receivable Report
- Tellus EVV Integration Update
- Fee-Based Scheduling
- Fall Risk Report
- Collections Center
- Sandata EVV Integration Update (Wisconsin)
- Supply Utilization Reports
- Earned Revenue Report Update
- General Ledger Report Revenue Recognition
- License and Compliance Tracking Updates
- Month-End AR Report Aging Buckets
- COVID-19 Vaccinations Report
- Fall Risk Assessment Addendum
- Gross Profit in Schedule Summary
- EVV Time Management Alerts
- Chart of Accounts Mapping
- Billing and Financial Tabs in Company Setup
- Mobile Seizure Record Addendum
- View Task Documentation in Family Portal
- Oxygen Safety Risk Report
- Client Bill Rates Report
- Primary Payer for Private Pay Clients
- EVV Time Manual Adjustment Icons
- Oxygen Safety Risk Quick Report
- Addenda Tab in Assessments
- Mobile Narrative Addendum
- Unlink Claims/Invoices From Remits
- Skilled Nurse Pediatric Visit Note
- Payer Documents
- Mobile Suction Log Addendum
- Claim and Invoice Balances
- Private Pay Client Statement Report
- Invoice Comments
- Gender Pronouns
- Visit Tracking Updates
- COVID-19 Immunization Logs
- Remittance Posting Updates
- Mobile Supply Worksheet Addendum
- New User Limitations
- Responsive Navigation Menu
- Employee Chart Limitations
- Transfer Invoice Overpayments
- Employee Emergency Contacts
- Temperature in COVID-19 Screenings
- Immunization Profile in Assessments
- Oxygen Risk Assessment Addendum
- Company Setup Enhancements
- Alternate Remittance Addresses
- Private Pay Deposits
- General Ledger Report
- Enhanced Payroll Rounding Policies
- Postal Code Report
Task Reassignment Tracking
- Dashboard Updates
- Create Claims by Authorization
- Care Plans for Upcoming Care Periods
- Remittance Posting
- COVID-19 Screening Updates
- Client Contact Payer Addresses
- Alert Center Enhancements
- Courtesy Billing
- ST Pediatric Documentation
- Company Logos on Invoices
- OT Pediatric Documentation
- Bulk Resubmit Visits
- Month-End AR Roll Forward Report
- Schedule Conflict Filtering
- PT Pediatric Documentation
- Payer Rounding Policies
- Infectious Disease Screening Report
- Agency Schedule Updates
- Earned Revenue Report
- Month-End AR Report
- Mobile App Spanish Translations
- Schedule Center Updates
- Mobile Task Details Screen Updates
- EVV Grey House for All Visits
- Mobile Clock-In Restrictions
- Default Facility Type
- Claim and Invoice Notes
- Midnight Split Billing
- Physician Certification Statement
- Client Voice Recording
- Mobile COVID-19 Screening
- Non-Medical Assessment
- Telehealth Visit Note
- COVID-19 Teaching Guides
- Electronic ID Badge for Essential Personnel
- Filter QA Center/Alert Center by Tags
- Infectious Disease Profile/COVID-19 Screening
- Plan of Care CoP Updates
- Emergency Preparedness Report
- Coronavirus (COVID-19) Resources
- EDI Export Report (HHAeXchange) Updates
- Custom Service Documentation
- Mobile Skilled Nurse Visit Note
- Indiana Overhead Calculations
- Task Verification Buttons Relabeled Clock In/Clock Out
- Single Clock In/Out for Consecutive Visits
- Color Change for Documents Returned from QA
- Multiple Addresses & Community Services
- Mobile Documentation Guided Validations
- Mobile Offline EVV & Documentation
- Billing Provider Secondary IDs
- Payer Categories
- Payroll CSV Export
- Suppress NPI on Claims
- Schedule Summary
- Client Advocate Role
- Family Provider Limits
- Payment/Adjustment Report
- Claim & Invoice Activity Report
- Admission Type Update (UB-04)
- EVV Grey House
- Preventing Future Documentation
- Referral Tracking Report
- Employee Document Management
- Mobile Note Validations
- Custom Care Plan Updates
- Branch Level Tax ID
- Closed Accounting
- EVV Geofence Update
- Personnel Notes
- EDI Export Report (HHAeXchange)
- New Mobile Documentation
Axxess Home Care now enables users to track and monitor task reassignments. When reassigning a scheduled task in Axxess Home Care, users can now select the reassignment type and reason to appear in the task’s details.
By facilitating seamless reassignment tracking, this functionality streamlines scheduling processes and enables organizations to better monitor employee performance, evaluations and unemployment claims for continued compliance and optimal client care.
To monitor task reassignments, users must have permission to track visits in Axxess Home Care.
Visit Tracking Permission
To give a user permission to track visits, navigate to the user’s profile and select Permissions in the Quick Links menu. In the Administration section, select Visit Tracking under User . Click Save to finish granting the permission to the user.
Employees tab ➜ Employee Center ➜ Quick Links ➜ Permissions ➜ Administration ➜ User ➜ Visit Tracking ➜ Save
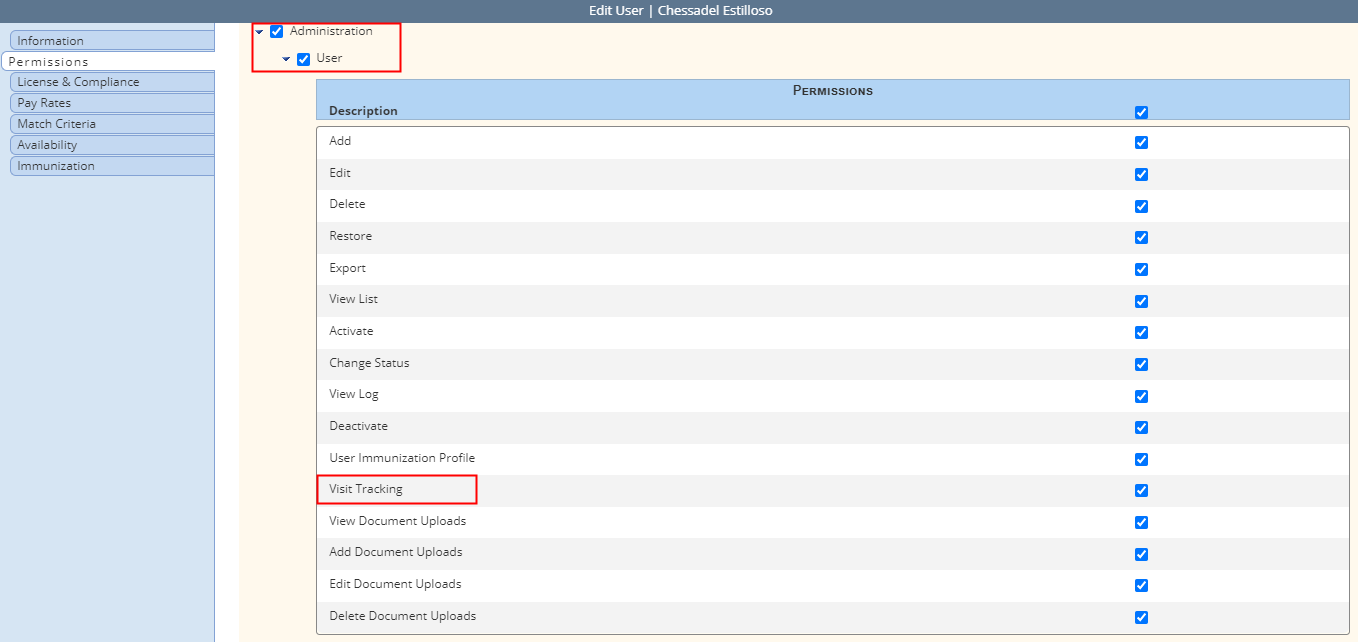
Add Task Reassignment Reasons
Users can enter reasons for task reassignments in Company Setup. The reassignment reasons entered in Company Setup will appear on the scheduling screens when reassigning tasks.
To add task reassignment reasons, navigate to Company Setup under the Admin tab. On the Scheduling tab, a list of reasons for reassignment appears under Visit Management .
To add a new reason, click Add New . Enter the category, type and reason, and click Save & Close .
To edit or deactivate an existing reason, click Edit or Deactivate under the Actions column.
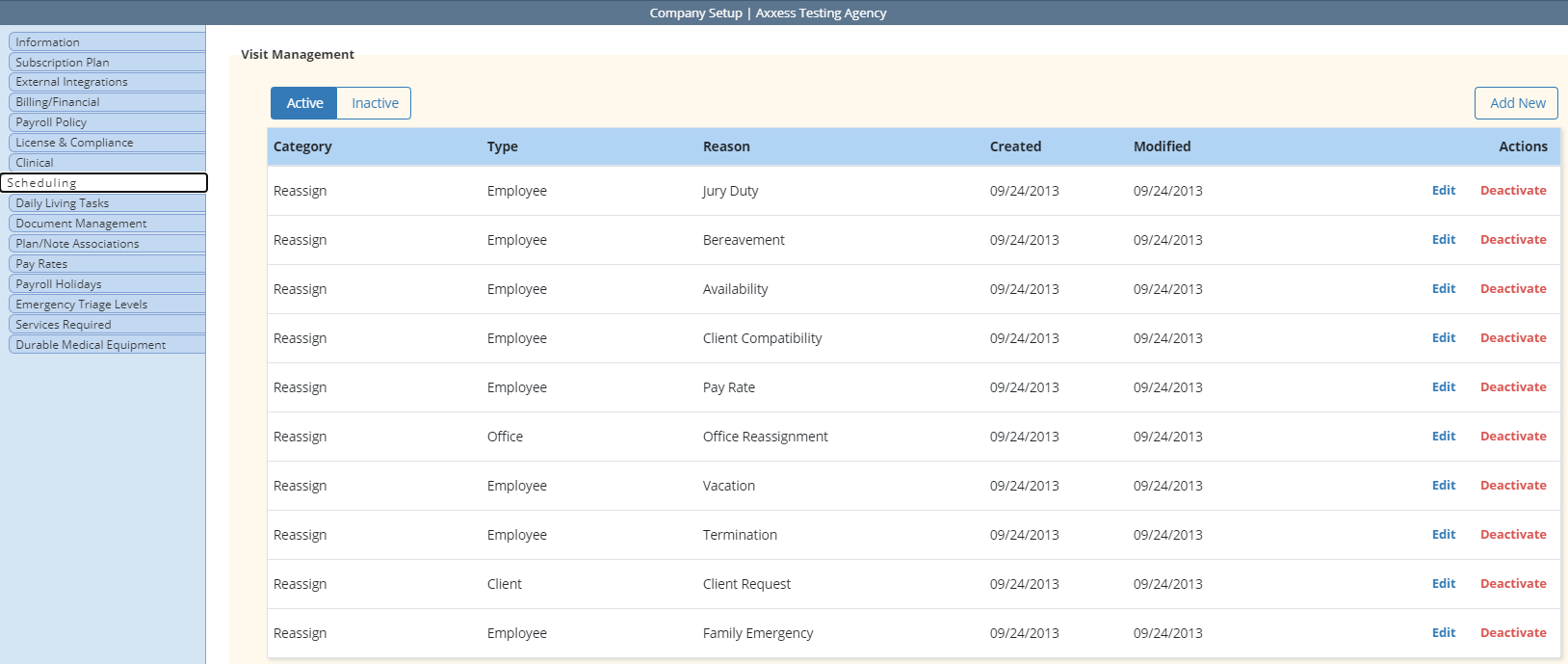
The reasons activated in Company Setup will appear when reassigning tasks in the Schedule Center and Task Manager.
Reassign Tasks
When reassigning a task, identify the reason for reassignment by selecting a reason type under the Reason field.
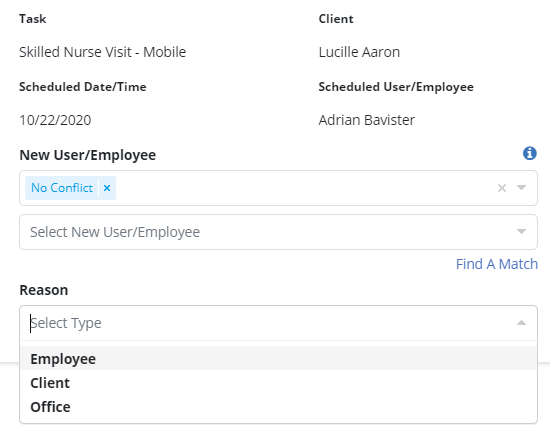
Once the reason type is selected, the associated reasons will populate in the subsequent drop-down menu. Select a reason and click Save to finish reassigning the task.
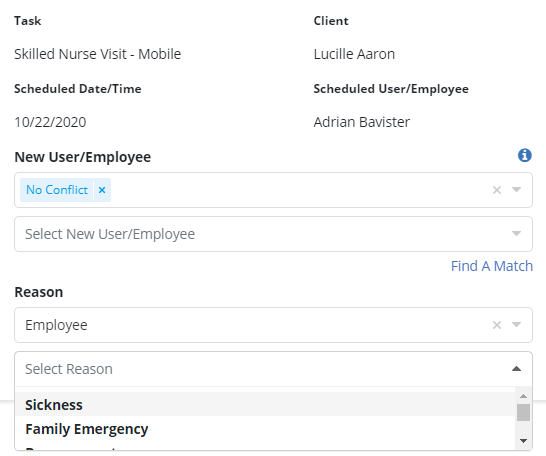
To bulk reassign a group of tasks, navigate to the Task Manager in the Schedule Center . Select tasks to reassign and click Reassign . Select the reason type and reason in the Bulk Reassign Tasks window and click Save . The selected reason and reason type will apply to all selected tasks.
Schedule tab ➜ Schedule Center ➜ Task Manager tab ➜ Select tasks ➜ Reassign ➜ Select reason and type ➜ Save
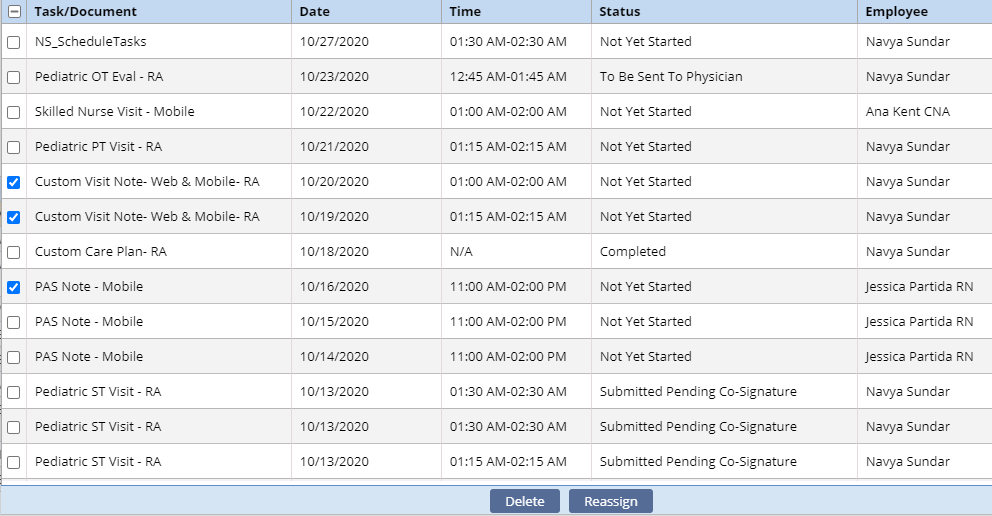
Once completed, the reassignment will appear in the Schedule Tasks Logs .

Visit Tracking
All tasks reassigned for an Employee reason type will appear in the employee’s Visit Tracking report. To view an employee’s Visit Tracking report, navigate to the employee’s profile and select Visit Tracking from the Quick Links menu.
Employees tab ➜ Employee Center ➜ Quick Links ➜ Visit Tracking
The Visit Tracking report displays all reassignments initiated for the employee.
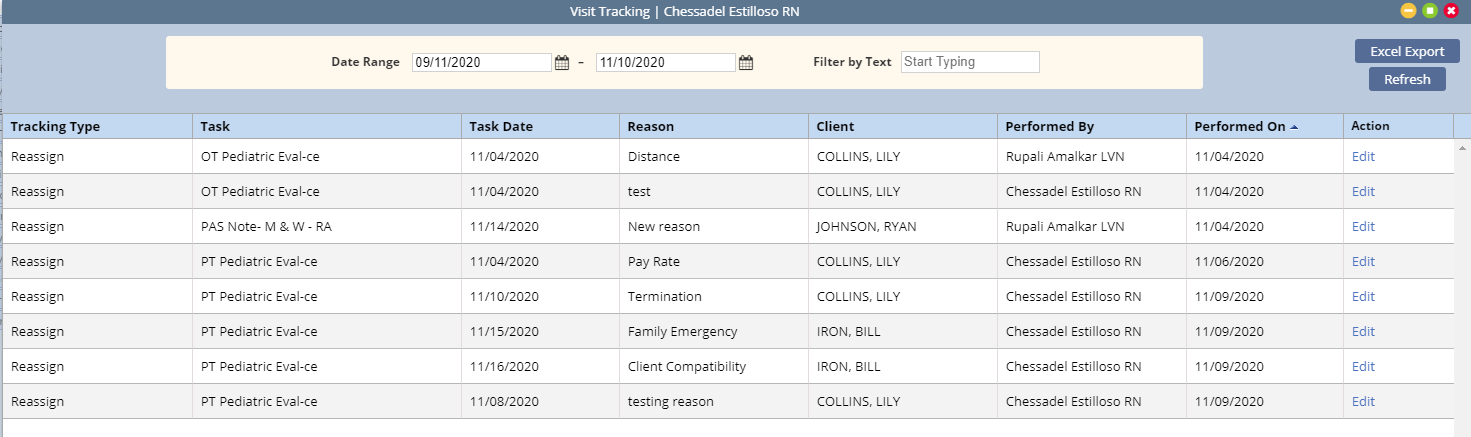
To edit the reason for a reassignment, select Edit from the Actions column.

Updated on 11/11/2020
Related posts:
Enabling tasks to be reassigned at run time
As the author of a client-side human service, you can add implementation logic to your service to enable Process Portal users to reassign tasks at run time.
About this task
- If the task is not claimed when the postpone event is executed, the new owner resumes the task at the node that follows the postpone event.
- If the task is already claimed when the postpone event is executed, the new owner resumes the task at the last save point prior to the task reassignment.
- If the client-side logic includes an end event, the end event ends the flow for the current user, but does not end the task and does not perform any data save either. When claimed by the next owner, the task is resumed at the last save point, which is located before the last service call.
The following procedure is provided as an implementation example for a task reassignment. You can use a different implementation to meet your business needs.
To enable users to reassign a task, complete the following steps:
- Open the appropriate process application.
- From the library, click the plus sign (+) next to Implementation , and create a general system service.
- Using the palette tools, add a server script to the service and connect it to the start and end events.
- In the Implementation properties of the server script, enter the JavaScript code that includes the logic for task reassignment. For example, tw.system.currentTask.reassignBackToRole(); .
- Open the client-side human service that you want to work with.
- In the Diagram view, add the service node for task reassignment. For example, the service can be implemented as a general system service, but the implementation can use any service type that can be called from a service node.
- In the Implementation properties of the service, under Behavior , select Call a service , and then specify the general system service that you created earlier.

- In the diagram, connect the postpone event to the node where you want the task work to be postponed, and add an outgoing connection from the postpone event to the node where you want work to be resumed by the new task owner.
- In the Implementation properties, under Event Navigation , specify a navigation option for the postpone event, which determines what the user will see after the service is postponed. You can choose between Default (behavior provided by the hosting UI) , Go to the instance details UI , or Go to a specified URL . Tip: Navigation occurs only if the hosting user interface provides navigation support.
- Using the Intermediate event palette tool, add another stay-on-page event to the diagram, and connect it to the postpone event in the subflow that contains the service node for task reassignment.

Community Tip - Did you know you can set a signature that will be added to all your posts? Set it here! X
- Windchill Customization
- Task Reassignment comments to be accessible in Dis...
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Printer Friendly Page
Task Reassignment comments to be accessible in Discussions table

- Mark as New
- Notify Moderator
- General Customization
- All forum topics
- Previous Topic


Administrative Assistant
Job Description:
Job Title: Administrative Assistant
Location: London
Company Overview:
At Bank of America, we are guided by a common purpose to help make financial lives better through the power of every connection. Responsible Growth is how we run our company and how we deliver for our clients, teammates, communities and shareholders every day.
One of the keys to driving Responsible Growth is being a great place to work for our teammates around the world. We’re devoted to being a diverse and inclusive workplace for everyone. We hire individuals with a broad range of backgrounds and experiences and invest heavily in our teammates and their families by offering competitive benefits to support their physical, emotional, and financial well-being.
Bank of America believes both in the importance of working together and offering flexibility to our employees. We use a multi-faceted approach for flexibility, depending on the various roles in our organization.
Working at Bank of America will give you a great career with opportunities to learn, grow and make an impact, along with the power to make a difference. Join us!"
Location Overview:
Our London office is based just a stone’s throw from the magnificent St. Paul’s Cathedral on bustling King Edward Street. Here you’ll find modern workspaces and a state-of-the-art auditorium space. In addition, we’re proud to host an onsite restaurant that shares our commitment to sustainability by providing delicious seasonal menus which have been created with the planet in mind. Make sure to take time for yourself and head up to our rooftop terrace and take in the spectacular views across London. Finally, your physical wellness is well-catered for with our onsite gym facilities and medical centre. "
Role overview
The EMEA HR team are looking for an experienced Administrative Assistant to provide comprehensive support to members of the EMEA HR Management Team and to support team activities. This is a fast-paced environment and a great opportunity to support across a diverse set of HR leaders. You will be highly organised, intellectually curious, and able to balance the needs of the business, prioritising your workload whilst maintaining a high standard of professionalism.
Responsibilities
- Diary management for senior leaders and teams including booking travel and arranging meetings.
- Expense processing and invoice management using Concur.
- Handling calls
- Performing complex administrative duties
- Supporting projects
- Handling highly sensitive and confidential HR data
- Assisting with onboarding new hires
- Supporting management of files, directories and Distribution Groups
- Raising system access requests and workday tasks
What we are looking for
- Experienced administrator within a global matrixed organisation
- Solid experience of supporting multiple people
- Advanced knowledge of all Microsoft products
- Accuracy and attention to detail
- Excellent organisational skills
- Travel booking and Diary Management experience.
- Ability to prioritise, use initiative and work under pressure.
- Excellent communicator, both written and verbal
- Ability to engage and communicate confidently with senior stakeholders.
- Ability to build and nurture strong working relationships.
Skills that would help
- Experience as administrative support in a Financial Services organisation
- Experience supporting in an HR function.
Benefits of working at Bank of America:
- Private healthcare for you and your family plus an annual health screen to help you manage your physical wellness with the option to purchase a screen for your partner.
- Competitive pension plan, life assurance and group income protection cover if you become unable to work as a result of a disability or health reasons.
- 20 days of back-up childcare including access to school holiday clubs and 20 days of back-up adult care per annum
- The ability to change your core benefits as well as the option of selecting a variety of flexible benefits to suit your personal circumstances including access to a wellbeing account, travel insurance, critical illness etc.
- Access to an emotional wellbeing helpline, mental health first aiders and virtual GP services.
- Access to an Employee Assistance Program for confidential support and help for everyday matters.
- Ability to donate to charities of your choice directly through payroll and the bank will match your contribution.
- Opportunity to access our Arts & Culture corporate membership program and receive discounted entry to some of the UK’s most iconic cultural institutions and exhibitions.
- Opportunity to give back to your community, develop new skills and work with new groups of people by volunteering in your local community.
Bank of America:
Good conduct and sound judgment is crucial to our long-term success. It’s important that all employees in the organisation understand the expected standards of conduct and how we manage conduct risk. Individual accountability and an ownership mind-set are the cornerstones of our Code of Conduct and are at the heart of managing risk well.
We are an equal opportunities employer and ensure that no applicant is subject to less favourable treatment on the grounds of sex, gender identity or gender reassignment, marital or civil partner status, race, religion or belief, colour, nationality, ethnic or national origins, age, sexual orientation, pregnancy or maternity, socio-economic background, responsibility for dependants or physical or mental disability. The Bank selects candidates for interview based on their skills, qualifications, and experience.
We strive to ensure that our recruitment processes are accessible for all candidates and encourage any candidates to tell us about any adjustment requirements.
Hours Per Week:
Weekly Schedule:
Referral Bonus Amount:
Learn more about this role
JR-24014681
Manages People:
Street Address
Primary location:, important notice: you are now leaving bank of america.
By clicking Continue, you will be taken to a website that is not affiliated with Bank of America and may offer a different privacy policy and level of security. Bank of America is not responsible for and does not endorse, guarantee or monitor content, availability, viewpoints, products or services that are offered or expressed on other websites.
You can click the Return to Bank of America button now to return to the previous page or you can use the Back button on your browser after you leave.
IMAGES
VIDEO
COMMENTS
Any user is eligible for task reassignment. Tasks that are assigned to a group, for example, to the Lane Participant, Routing Policy, or ad-hoc groups can be reassigned by the task owner to users within the group. Group managers that are defined for the task can also reassign the task. Defining group managers is not supported for ad-hoc groups.
This paper considers the task reassignment problem for distributed multiple Unmanned Aerial Vehicle (multi-UAV) systems in dynamic environment. For a dynamic reassignment problem in a multi-UAV system, the task information may be subject to different dynamic events, and many existing task allocation algorithms require much computation and communication resource to achieve a feasible solution ...
task reassignment for more than 20 robots. Figure 1: Median time to find a path using M* and rM*, for both the single heuristically cheapest task assignment and with task reassignment. The plateauing is the result of the planners reaching the 5 minute time limit. Conclusions We present task reassignment, a method for finding the opti-
Provide Support and Training. When reassigning a project, managers should provide support and training to team members who may be taking on new tasks. This can include providing resources and tools to help them complete the task successfully or offering training sessions to help them develop the necessary skills.
Task Reassignment Functions; Action Task Type Target Notes; Redirect User Tasks: All of the user's assigned tasks. During the period of the redirection, any tasks that would have been assigned to the user. A user selected by the supervisor. Redirection can be time delimited. Redirection does not affect the user's reserved tasks.
role and Task Reassignment role will give you the same role as Security Officer/Security Manager in DISS. Reviewer •Review standard form •Accept or Reject subject responses •Add attachments to responses for standard form •Create & search for subjects This combined with the FSO role and Task Reassignment role to give you the same role as ...
To enable users to reassign a task: Open the appropriate process application. Create a general system service for the task reassignment: Click the plus sign (+) next to Implementation, and create a general system service. Add a server script to the service and connect it to the start and end events. In the Implementation properties of the ...
Click the task you want to assign. This opens the Task Details page. On the Task Details page, in the Related Actions section, click Reassign this task to another user. In the Reassign Task dialog box, in Select User, type the name of the person or group who will complete the task. You can assign only one person or one group to a task.
Task Reassignment. Now, when reassigning a task, using the reassignment feature in Appian, you pass the accountability along to others. That is the only thing you do, without spending any time on trying to actually work on it. And, from that moment on, you no longer care about this task.
The algorithm was used for a single task reassignment situation, and it was not suitable for multiple tasks. Gao et al. designed a task reassignment algorithm based on the contract net protocol to solve the task reassignment problem when new targets appear or UAV damage occurs during task execution. However, with the expansion of the scale of ...
Multirobot path planning and task assignment are traditionally treated separately, however task assignment can greatly impact the difficulty of the path planning problem, and the ultimate quality of solution is dependent upon both. We introduce task reassignment, an approach to optimally solving the coupled task assignment and path planning ...
Apr 11, 2023. Task reassignment allows a DocuSign CLM administrator to change the ownership of an existing workflow task. Reassigning a workflow task is a two-part process. For an administrator to be able to reassign a task assigned to a specific user, they must first have (a) access to both the inbox of the user who currently owns the task and ...
Overview. The Task Reassignment utility allows users to reassign active tasks that are either accepted by or assigned to one specific user. Users can select one or more available tasks to reassign and must specify a user to receive the tasks. Key Features & Functionality. Self Reassignment. Any user in the system can reassign his/her own tasks.
To reassign a project task in bulk: Go to Lists > Relationships > Projects. Click View next to the project with tasks that you want to reassign. Click Resources. Click Resource Details. Click the clipboard icon next to the task you want to reassign to open the Reassign Tasks popup. A list of tasks to be reassigned appears.
Click on a task to open the Task Properties. Click the Actions menu and select Request Reassignment. Enter or click Search to find the reassignment. On the Create Reassignment Request, click the Select User button to select To User. Under Reassign, and select the tasks to be reassiged: Selected Tasks. Selected and Future Tasks.
The next reassignment request shows as the most recent. Up Next. Reassigned tasks that are approved route to the person to whom the task was reassigned. IMPORTANT: There is no notification to this individual that the task was reassigned. Workday Services recommends the original task owner communicate with the new task owner.
You can reassign tasks by dragging them from the right side panel and dropping them on to a new assignee on the left. Hover over the task, then click and hold the vertical dots to the left of the task before dragging it to a new assignee. The reassignment is instant and you will see their active tasks increasing and their percentage of the ...
Task Reassignment (Company and Project) When a user with assigned tasks is removed from a project, you (Company Administrator, Project Administrator, or Administrator user) can reassign the removed user's tasks to an active user. Note: In this scenario, you can only reassign tasks that have not been started, or tasks that are in progress.
Therefore, task reassignment is essential through reoptimization to adjust the previous plan, which is no longer optimal whenever dynamic events occur. The importance of this article is that the modified receding horizon task assignment algorithm is applied for accurate and efficient task reassignment. In addition, this article aims to provide ...
A distributed method to cope with dynamic events that occur online during the execution of original schedules and is able to provide a conflict-free solution with less data exchanges and runtime is proposed. This paper considers the task reassignment problem for distributed multiple Unmanned Aerial Vehicle (multi-UAV) systems in dynamic environment. For a dynamic reassignment problem in a ...
Axxess Home Care now enables users to track and monitor task reassignments. When reassigning a scheduled task in Axxess Home Care, users can now select the reassignment type and reason to appear in the task's details. By facilitating seamless reassignment tracking, this functionality streamlines scheduling processes and enables organizations to better monitor employee performance ...
To enable users to reassign a task, complete the following steps: Open the appropriate process application. From the library, create a general system service for the task reassignment: From the library, click the plus sign (+) next to Implementation, and create a general system service. Using the palette tools, add a server script to the ...
Task Reassignment comments to be accessible in Discussions table. Mar 06, 2024 01:53 AM. its more related to change task. When in the change task if we reassign the role of the specific task ( System engineer role) to other person, it will get recorded in the task history table. Well while making task reassignment in the change task we wanted ...
Raising system access requests and workday tasks; What we are looking for. Experienced administrator within a global matrixed organisation; ... gender identity or gender reassignment, marital or civil partner status, race, religion or belief, colour, nationality, ethnic or national origins, age, sexual orientation, pregnancy or maternity, socio ...